U ovom postu istražujemo što je BLDC motor i naknadno saznajemo u vezi s dizajnom upravljačkog kruga BLDC motora bez senzora.
BLDC ventilatori CPU-a
Jeste li vidjeli one brze ventilatore u procesorima, stabilizatorima napona, DVD uređajima i drugoj sličnoj opremi, koji rade s najvećom učinkovitošću, trošeći najmanje prostora, struje, a opet sposobni izvesti važne radnje kako je predviđeno za određenu opremu?
Da, to su sve moderne verzije BLDC ventilatora ili istosmjernih motora bez četkica koji su mnogo superiorniji od starih tradicionalnih četkanih motora.

Ljubaznošću slike: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Međutim, BLDC motor zahtijevat će sofisticirani upravljački sklop, i da. Svi ovi CPU ventilatori sadrže ugrađene upravljačke module, iako se čini da se njima lako može upravljati pomoću običnog istosmjernog istosmjernog sustava, interno je sustav već opremljen pametnim krugom.
BLDC motorni vozač
Ovdje ćemo naučiti o jednom takvom pametnom krugu pokretačkog motora BLDC, koristeći jedan čip DRV10963 za pogon bilo kojeg malog BLDC motora s nevjerojatnom učinkovitošću, a kasnije ćemo u jednom od sljedećih članaka vidjeti kako se ovaj IC krug može nadograditi za vožnju čak snažni visokonaponski BLDC-ovi poput onih koji jesu koristi se u quadcopterima.
Ali prije ovoga bilo bi zanimljivo naučiti malo o BLDC motorima.
Razlika između četkanog i četkanog istosmjernog motora
Razlika između četkanog motora i motora bez četkica i stupnja učinkovitosti prilično je očita.
Budući da četkani motori imaju namotanu armaturu koja se kreće između magneta, mora upotrijebiti 'četke' (kontakte za trljanje) tako da pomični terminali zavojnice mogu dosljedno primati opskrbni napon, a da sami ne dođu do izvora napajanja, koji bi inače radeći nemoguće i ugrožavaju operacije.
U motoru bez četkica zavojnica ili namot nikada se ne kreće i konstantan je, ovdje rotor nosi skup stalnih magneta i rotira se pod utjecajem magnetskih tokova okolnog namota.
Budući da je magnet bez gnjavaže i može raditi bez uključivanja terminala za upravljanje ili primanje napajanja, može se odvijati bez napora, vrteći se velikom brzinom i gotovo na bešumnoj razini.
Ali tu je kvaka. Da bi elektromagnet mogao reagirati na fluksije trajnog magneta, mora postojati neprekidni pomak magnetske faze ili polova, tako da su dvojica u stanju neprestano reagirati i prolaziti kroz suprotnu silu oslobađajući potrebnu torzijsku silu preko rotora i izvršite rotaciju rezultirajućim momentom.
U četkanom motoru to postaje lakše zbog samopodesive prirode zavojnice armature koja se može okretati i stvarati samoodrživu suprotstavljenu magnetsku silu i nastaviti se okretati bez potrebe za vanjskim impulsima ili obradom.
Međutim, u BLDC-u to postaje problem jer magnetni rotor ostaje 'neupućen' i zahtijeva izračunatu magnetsku naredbu od namota kako bi se okretao na smislen način, a ne na slučajan način.
Upravo zbog toga svi BLDC motori obavezno zahtijevaju sklop pogonskog sklopa motora za upravljanje tri različita seta namota unutar motora.
Stoga su svi BLDC u osnovi trofazni motori i obvezno zahtijevaju 3 faze za stvaranje rotacijskog momenta na rotoru.
Što rade BLDC upravljački programi bez senzora
Sklop upravljačkog kruga BLDC bez senzora jednostavno elektrificira 3 seta namota uzastopnim načinom tako da magnetni rotor može prolaziti kroz dosljednu suprotstavljenu silu omogućujući motoru da postigne trajni moment i rotacijsku silu.
Ali ovo uzastopno napajanje BLDC namotaja krugom ne može se samo nasumično podesiti, već mora biti u tandemu ili kao odgovor na rotacijski položaj magneta rotora, u suprotnom bi izvedba mogla proći i mogli bismo svjedočiti osovini motora (rotor ) rotira se slučajno, to je trzanje između kazaljke na satu i suprotno od kazaljke na satu bez razumnog okretanja.
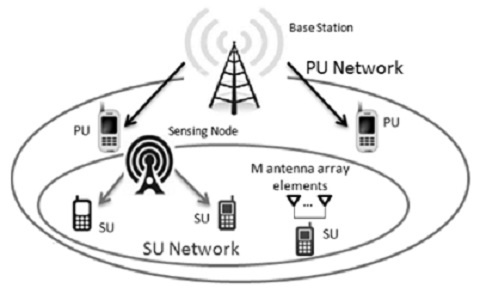
Zašto se senzori koriste u BLDC motorima
Stoga uvodimo senzore smještene unutar mnogih inačica BLDC motora, ti senzori (obično senzori Hallovog efekta) 'razumiju' promjenjivi položaj magnetskih polova rotorskog magneta, upućuju priključeni procesorski krug da elektrificira odgovarajući namot i izvrši rotacijsko kretanje s optimalnim zakretnim momentom.
Hallovi senzori efekta učinkovito se koriste u većini BLDC motora koji su relativno veće veličine, ali za manje motore poput CPU ventilatora, CPU pogona, DVD playera, u malim ispušnim ventilatorima, za motore koji se koriste u quadcopterima, senzori Hall efekta mogu postati neprikladni te se stoga primjenjuje alternativni pristup bez senzora.
To uključuje iskorištavanje zavojnice svojstvene leđnoj EMF električnoj energiji koja se uzima kao referentni izvor za obradu i elektrificiranje relevantnih setova namota i izvršavanje okretnog momenta.

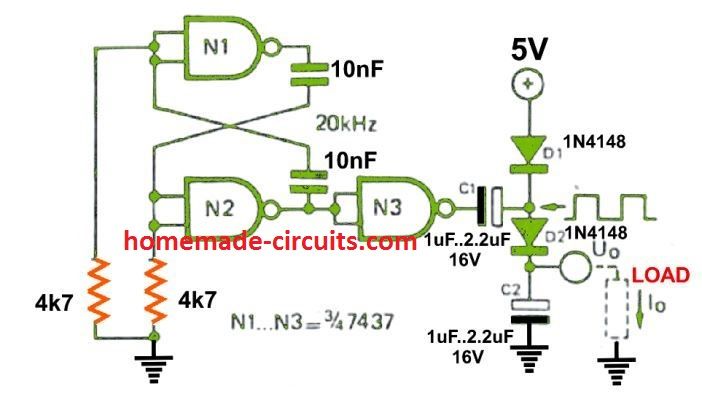
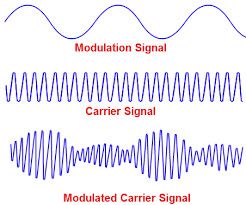
Simulacija kretanja BLDC rotora
U gornjoj sirovoj simulaciji možemo vizualizirati kako se oslobođeni EMF uzima kao referenca i koristi za proizvodnju impulsa za sekvenciranje za slijedeće setove namota, namećući zakretni moment na središnji rotor trajnog magneta. Simulacija možda nije točna replikacija, ali daje okvirnu ideju o principu rada.
Zanimljivo je primijetiti da se impuls prebacuje kada je N / S magneta točno u središtu jezgre namotaja, što omogućuje namotu da se ili energizira kao N ili S ovisno o polaritetu pulsa i proizvodi privlačenje i odbijanje sila na N / S magnete, stvarajući tako potreban moment na najvećoj mogućoj razini.
A to zauzvrat postaje moguće zahvaljujući stražnjem EMF-u koji se oslobađa prebacivanjem prethodnog namota.
Gornja rasprava pojašnjava rad senzora bez BLDC motora, sada naučimo kako navedeni krug postupa s gore navedenim složenim izvršavanjem trofaznog prebacivanja
BLDC upravljački program DRV10963
Nakon malo guglanja pronašao sam ovaj sklop upravljačkog sklopa BLDC bez senzora pomoću jednog čipa DRV10963 koji koristi zanemarivu količinu dijelova u konfiguraciji, a opet je u stanju implementirati sofisticiranu obradu za predviđene radnje.
DRV10963 je vrhunski čip koji je posebno dizajniran za rad BLDC motora bez senzora, samo predviđajući stražnji EMF od namotaja motora i pružajući preciznu naredbu nad namotom i postižući optimalan okretni moment nad rotorom.
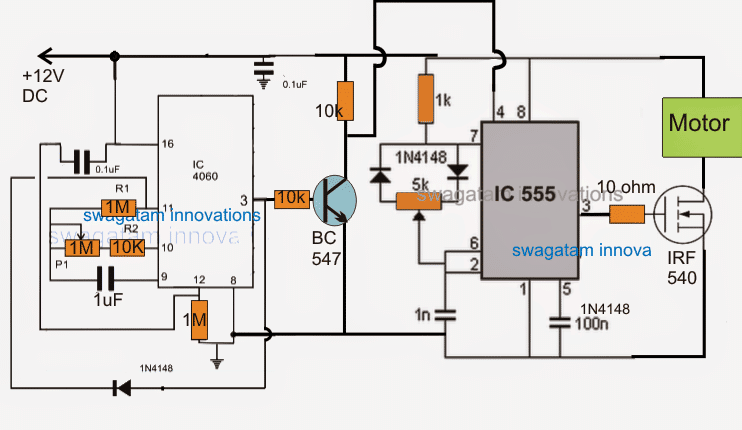
Kružni dijagram

Gornja slika prikazuje jednostavan izgled sklopa koji očito ne uključuje ništa osim same IC.
Različiti izvodi se dodjeljuju za izvršavanje određenih funkcija, kao što je PWM kontrola brzine motora, upravljanje smjerom, itd. Jednostavnim unošenjem relevantnih izvoda s navedenim podacima iz vanjskog izvora.
Sljedeća slika prikazuje paket čipa, koji izgleda kao 10-polni DIL IC, razne funkcije pinouta istog mogu se proučavati iz podataka kako je prikazano na dijagramu:

Pozivajući se na shemu spojeva predloženog kruga upravljačkog sklopa BLDC bez senzora kao što je predstavljeno u prethodnom članku, kao i gornja slika čipa, detalji pinouta mogu se shvatiti kako slijedi:
Pojedinosti IC pinouta
FG = To je zatik (indikator) indikatora brzine motora, koji je postavljen u otvorenom kolektoru s unutarnjim BJT-om.
Otvoreni kolektor znači da će izlaz na ovom pinoutu proizvesti negativne PWM-ove kroz tonuće logike preko otvorenog kolektora i zemlje, tako da će korisnik, kako bi dobio valjano očitanje, preko ovog otvorenog kolektora povezati povlačni otpor i pozitivno napajanje (5V ) za postizanje pokazatelja brzine na ovom pinoutu.
FGS = To je ulaz izbornika indikatora brzine, što znači da se ovdje može uvesti logika visoka ili niska za UKLJUČIVANJE / ISKLJUČAVANJE iglice pokazivača FG.
Vcc = pozitivna opskrba IC-a radi omogućavanja rada, ne smije prelaziti 5V.
W, U i V su trofazni izlazi za BLDC motor koji bi trebao raditi preko ovog IC-a. To također djeluje poput ulaza za osjet EMP impulsa motora za potrebno sinkronizirano prebacivanje zavojnica motora.
GND = Odnosi se na negativni pinout IC-a u odnosu na Vdd pin.
FR = Pomaže u odabiru ili naredbi smjera motora i može se dinamički mijenjati u bilo kojem trenutku nakon što se sustav uključi, jednostavnim uvođenjem vanjske logike visoke ili logike nisko.
PWM = Označava PWM upravljački ulaz iz vanjski generator valnog oblika PWM.
Ovaj PWM ulaz može biti promjenjiv za provođenje željene kontrole brzine priključenog BLDC motora.
Točkasti prostor u sredini čipa označava termalnu podlogu koja se može stegnuti ili pritisnuti hladnjakom kako bi se potopilo moguće stvaranje topline na čipu dok se koristi s opterećenim BLDC motorom.
Gornja rasprava navodi pinout ili detalje o povezivanju čipa upravljačkog programa motora BLDC bez senzora DRV10963, sada ćemo detaljno analizirati unutarnju konfiguraciju i rad čipa uz pomoć sljedećih točaka:
Opis uređaja
DRV10963 je trofazni elektromotor bez senzora s ugrađenim MOSFET-ovima snage (3-fazni H-premošteni). Prilagođen je za veću produktivnost, smanjenu buku i minimalne funkcije motornog pogona s brojem sekundarnih materijala. Ekskluzivna sinusna shema upravljanja bez prozora bez senzora za 180 ° pruža efikasnost vožnje bez putovanja u motoru.
DRV10963 sastavljen od funkcije pametne detekcije brave, zajedno s dodatnim ugrađenim sigurnosnim krugovima za postizanje osiguranih performansi. DRV10963 se može naći u toplinski učinkovitom 10-polnom USON pakiranju s nepokrivenom termalnom prostirkom.
Kako IC funkcionira
Proizvod DRV10963 trofazni je motor bez senzora s MOSFET-ovima s ulivenom snagom
stvoren posebno za vrhunske performanse, smanjenu rezonanciju i minimalne funkcije površinskog broja dijelova motora.
Glavni plan za sinusoidno upravljanje bez prozora za 180 ° predstavlja bešumno funkcioniranje motora održavanjem nominalno nabreknutog električno stimuliranog momenta. Nakon inicijalizacije, uređaj DRV10963 okretat će motor u smjeru navedenom kroz ulazni klin FR.
Čip DRV10963 funkcionirat će s 3-faznim BLDC motorom koristeći sinusni plan upravljanja.
Značaj korištenih napona sinusoidne faze ovisi o radnom ciklusu PWM klina. Dok se motor kreće, DRV10963 IC isporučuje podatke o brzini na FG pinu.
Jedinica DRV10963 sastoji se od mogućnosti pametnog zaključavanja. U slučaju da je motor zaustavljen zbog stranog pritiska, program će identificirati problem zaključavanja i poduzet će mjere da se samostalno zaštiti zajedno s motorom.
Određeni postupak kruga osjetnika zaključavanja detaljno je prikazan u Detekciji zaključavanja. DRV10963 IC nadalje uključuje više ugrađenih sigurnosnih krugova, na primjer preko strujne zaštite, prenaponske zaštite, podnaponske zaštite i zaštite od temperature.
Karakteristično objašnjenje
Ulaz i kontrola brzine
DRV10963 predstavlja trofazne PWM izlaze od 25 kl-lz koji mogu imati standardni postotak sinusoidnih valnih oblika iz faze u fazu. U slučaju da se bilo koji ciklus utvrdi u odnosu na tlo, otkriveni valni oblik vjerojatno će biti zaštićeni PWM sinusoid u kombinaciji s harmonikama 3. reda, kao što je prikazano na slici 2.

Ova strategija kodiranja pojednostavljuje pogonske specifikacije iz razloga što će vjerojatno često postojati jednofazni izlaz koji bi mogao biti ravan nuli.
Amplituda ishoda varira ovisno o naponu napajanja (VCC) i propisanom radnom ciklusu PWM (PWM) kako je definirano u jednadžbi 1 i istaknuto na slici 3. Optimalna amplituda provodi se nakon što zadani radni ciklus PWM iznosi 100 POST.
Vphpk = PWMdc>

Brzina motora ne regulira se izravno pomoću PWM-a radi regulacije amplitude faznih napona koji se koriste za motor.
Radni ciklus ulaza PWM modificiran je u 9-bitnu digitalnu veličinu (od 0 do 511).
Rezolucija propisa je 1/512 == 0,2%. Analizator radnog ciklusa omogućuje početnu operaciju izmjene naloga između ulaznog radnog ciklusa i 9-bitne digitalne slike.
To je istaknuto na slici 4, na kojoj je r = 80 ms.

Izmjena izvedbe između PWM-ovog radnog ciklusa zajedno s izlaznom maksimalnom amplitudom je promjenjiva u uređaju DRV10963.
O maksimalnoj amplitudi ishoda raspravlja se u jednadžbi 1 kada je PWM naredba> minimalni radni radni ciklus. Najniži radni ciklus rada često se uspostavlja na 13%, 10%, 5% ili bez ograničenja postavkom OTP (MINOP_DC1: 0).
Tablica 1. prikazuje preporučene konfiguracije za minimalni radni ciklus rada.
Kad god je zadati radni ciklus PWM manji od najnižeg radnog ciklusa i veći od 1,5%, izlaz će se regulirati na minimalnom radnom ciklusu rada. Kad god je ulazni radni ciklus ispod 1,5%, uređaj DRV10963 vjerojatno neće pokretati izlaz i šalje se u stanje čekanja.
To se može ilustrirati na slici 6.

Rotacijske konfiguracije
DRV10963 pokrenut će motor tehnikom koja je detaljno opisana na slici 7.

Grafikon inicijalizacije motora sastoji se od alternativa koje je moguće konfigurirati na uređaju za ograničenje prelaska u otvorenu petlju za zatvaranje petlje (KAKO), vrijeme poravnanja (TAHQH) i brzinu ubrzanja (RACE).
Kako bi rotor uskladio s komutacijskom logikom, DRV10963 izvršava x% radnog ciklusa na fazama V i W istodobno kontrolirajući fazu U na GND.
Ovaj se scenarij zadržava TAIign sekundi. Značaj x% prepoznaje se pomoću napona VCC (kao što je prikazano u tablici 2) kako bi se zadržao obrtni moment obrtnog momenta pri različitim različitim naponima napajanja.
Kako se završava poravnanje, motor je prisiljen ubrzati stavljanjem sinusoidnih faznih napona s vršnim razinama kao što je prikazano u tablici 2 i pojačavanjem pomoću komutacijskog područja pri rastućoj brzini prikazanoj RACE dok razina komutacije ne naraste na Hom , Hz.
Čim se dosegne ovo ograničenje, DRV’l0963 pretvara se u način zatvorene petlje, pri čemu ugrađeni upravljački algoritam prepoznaje napredak komutacijskog pogona, dok se zaposleni napon identificira PWM-ovim ulazom radnog ciklusa.
Otvorena petlja za zatvaranje ograničenja petlje petlje (Hom), vrijeme poravnanja (TAHQH) i brzina ubrzanja (RACE) mogu se konfigurirati putem OTP konfiguracija.
Odabir praga primopredaje (KAKO,) obično se odobrava procjenom pokušaja i pogrešaka. Cilj bi bio dati prednost toleranciji primopredaje koja bi mogla biti što manje izvediva i omogućava motoru bez napora i vjernosti prebacivanje između ubrzanja otvorene petlje i ubrzanja zatvorene petlje.
Motori s povećanom brzinom (maksimalne brzine) zahtijevaju superiornu toleranciju primopredaje, jer motori s povišenom brzinom sadrže smanjeni Kt, a time i povoljniji BEMF.
Tablica 3 prikazuje podesive preferencije za toleranciju primopredaje. Najveće brzine u električnom Hz dokazane su kao referenca za pomoć pri odabiru poželjne brzine primopredaje za određenu prijavu.

Izbor vremena poravnanja (TAHQH) i brzine ubrzanja (RACE) može čak ovisiti o ispitivanju pokušajima i pogreškama.
Motori s većom inercijom obično zahtijevaju produženo vrijeme poravnanja i sporiju brzinu ubrzavanja za razliku od motora s malom tromošću koji obično zahtijevaju kraće vrijeme poravnanja zajedno s postotkom bržeg ubrzanja. Programske kompromise treba provesti kako bi se iskoristila stabilnost lansiranja, za razliku od razdoblja rotacije.
TI odobrava, počevši od odluke o manje intenzivnim konfiguracijama (sporiji RACE i značajni Tmign) kako bi se kompromitiralo vrijeme do momenta kao podrška maksimalnoj stopi ispunjenja.
Čim se oprema potvrdi za savjesno izvođenje, ekstra snažne konfiguracije (veći RACC i manji TAHQH) mogu se upotrijebiti za smanjenje trenutka pojačanja i istovremeno oprezno praćenje stope ispunjenja.
Tablica 4 prikazuje podesive postavke za TA'g ,, i RACE.

Preostali dio objašnjenja u vezi s ovom BLDC IC-om bez senzora je predan u ovom izvornom listu podataka
Slobodno komentirajte kako biste saznali više o gore spomenutim detaljima kruga pokretačkog motora BLDC motora bez senzora
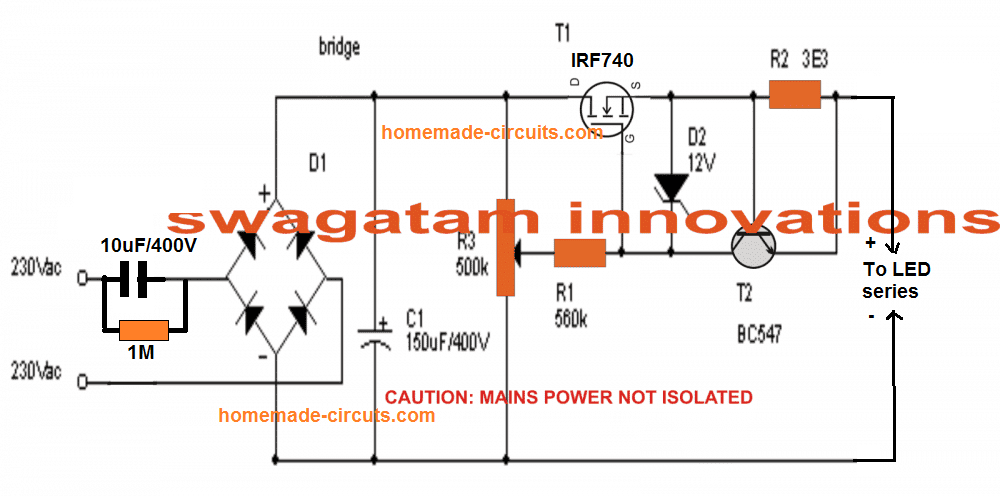
Prethodno: Krug napajanja 12V LED ruksaka Dalje: Krug daljinskog upravljača Quadcopter bez MCU-a