U ovom postu raspravljat ćemo o osnovama sklopa tijela quadcopter-a pomoću aluminijskih cijevi i vijaka, u kasnijim odjeljcima članka također ćemo razgovarati o jednostavnom krugu drona koji bi se mogao koristiti za letenje malim sklopom drona, bez ovisnosti o složenim mikrokontrolerima.
Kvadrokopter je možda najjednostavniji leteći stroj koji zahtijeva minimalnu količinu aerodinamičke točnosti i komplikacija, pa stoga ne čudi, mogao bi steći ogromnu popularnost među raznim hobistima koji bi to uspješno mogli izraditi .... stroj kojim bi zapravo mogli letjeti i kontroliraju po vlastitoj volji.
Quadcopter Dynamics
Činjenica da je bespilotna letjelica quadcopter najjednostavnija u tehničkom i dinamičkom smislu zapravo je posljedica sudjelovanja 4 propelera i uravnotežene strukture okvira, koji omogućuju stroj da leti s relativno dobrom ravnotežom, čak i u teškim klimatskim uvjetima.
Ali jednostavnost također implicira da sustav možda neće biti toliko učinkovit kao konvencionalni modeli zrakoplova i helikoptera koji su zamršeno dizajnirani za pokazivanje ekstremne učinkovitosti u pogledu brzine i potrošnje goriva, te naravno nosivosti ... sve to u osnovi može biti nedostaje tipičan sustav quadcopter.
Ipak, što se tiče hobi projekta, ovaj stroj postaje idealan izbor za većinu entuzijasta kojima je vrlo zabavno i intrigantno napraviti vlastiti leteći stroj kod kuće, koji u konačnici 'osluškuje' i leti u bilo kojem smjeru u kojem se nalazi korisnik više voli da se kreće.
Međutim, za novog igrača, koji možda nije tehnički toliko upućen, možda će i ovaj jednostavni stroj biti izuzetno kompliciran za razumijevanje, jednostavno zato što većina povezanih informacija predstavljenih na mnogim web stranicama ne uspijeva lucidno raspraviti koncept i na 'jeziku' koji možda odgovara laiku.
Ovaj je članak posebno napisan za one ne baš tehničke ljude koji su zainteresirani za izgradnju veličanstvenog letećeg stroja, ali im je predmet pretežak za probaviti.
Zašto je Quadcoptere danas tako lako graditi
Jeste li se ikad zapitali zašto je quadcopter-e i dronove tako jednostavno konstruirati u današnjem svijetu, a možda je ranije bilo nemoguće koristiti električnu energiju?
To je u osnovi zbog razvoja i poboljšanja Li-Ion baterija. To su danas izuzetno učinkoviti oblik baterija koji nude impresivan omjer snage i mase. Uz to, izum BLDC motora i visoko pročišćenih motora s permanentnim magnetima također su doprinijeli da se dronovi lako izrade.
Li-Ion baterija u stanju je pružiti nevjerojatnu količinu rotacijskog momenta na motorima koji postaje dovoljan da quadcopter jedinicu gurne na veliku nadmorsku visinu u roku od nekoliko sekundi, a omogućuje joj i dugotrajno zadržavanje zraka izvedba vrlo učinkovita i korisna.
Kako leti Quadcopter
Krenimo sada na pravi put i shvatimo koje su bitne stvari potrebne za uspješno letenje quadcopter-a. Evo osnova za uspješno postizanje nesmetanog leta stroja:


1) U osnovi stroj zahtijeva čvrsto i snažno tijelo, ali izuzetno male težine. To se može izraditi ili sastaviti pomoću šupljih kvadratnih aluminijskih cijevi za ekstrudiranje, prikladnim bušenjem rupa i pričvršćivanjem okvira maticama i vijcima.
2) Konstrukcija treba biti u obliku savršenog '+' ili savršenog 'x', ne čini razliku sve dok je kut između cijevi za 'križanje' 90 °.

Osnovni elementi potrebni za konstrukciju quadcopter-a mogu se vidjeti na sljedećoj slici:

Simulacija sastavljanja dijelova
Gruba animirana simulacija u nastavku pokazuje kako sastaviti gore prikazane elemente zajedno:

Kako izraditi Quadcopter Framework
Aluminij za '+' okvir može se dobiti odgovarajućim rezanjem i dimenzioniranjem gotovih cijevi za ekstrudiranje aluminija, kao što je prikazano dolje:

Veličina okvira je relativna i stoga nije presudna, možete sagraditi široki okvir s široko postavljenim motorima ili izraditi prilično kompaktnu strukturu okvira gdje motori nisu preširoko razdvojeni ... iako se mora osigurati da propeleri su dobro udaljeni jedni od drugih kako bi omogućili bolju ravnotežu i ravnotežu.
3) Struktura okvira '+' mora biti opremljena kvadratnom platformom na središnjem dijelu gdje se krakovi okvira spajaju i križaju. To bi mogla biti jednostavno uglačana aluminijska ploča odgovarajuće dimenzije za ugodan smještaj sve potrebne elektronike i ožičenja.
Stoga je ova središnja ploča ili platforma u osnovi potrebna za instaliranje i smještaj elektronike sustava koja bi u konačnici bila odgovorna za upravljanje vašim quadcopterom.
4) Nakon dovršetka gornjeg okvira, motori se moraju učvrstiti na krajevima poprečnih šipki, kao što je prikazano na gornjim slikama.
5) Nepotrebno je reći da sve instalacijske radove treba obaviti s najvećom preciznošću i savršenim poravnanjem, to bi moglo zahtijevati udruživanje iskusnog proizvođača za taj posao.
Budući da je sve u dizajnu u parovima, točno poravnavanje elemenata zapravo neće biti previše teško, radi se samo o dimenzioniranju i uklapanju parova sa što više sličnosti, što će zauzvrat osigurati maksimalnu razinu ravnoteže, ravnoteže i sinkronizacije za sustav.
Jednom kad je okvir izgrađen, vrijeme je da integrirate elektroničke sklopove s odgovarajućim motorima. To će trebati učiniti prema uputama u datom priručniku za strujni krug.
Ploče s pločicama mogu se postaviti na donju stranu središnje ploče s odgovarajućim kućištem ili preko ploče, opet s odgovarajućim ormarićem za čvrsto zatvaranje.

Razumijevanje smjera okretanja propelera
Analizirajući smjer rotacije motornih propelera za uravnoteženi dizanje:
Pozivajući se na gornju animiranu simulaciju, smjer vrtnje propelera motora treba poravnati na sljedeći način:
Jednostavno mora biti takvo da motori na krajevima jedne šipke trebaju biti identični, ali različiti od smjera motora druge šipke, što znači da ako jedna šipka ima motore koji se okreću u smjeru kazaljke na satu, tada se motori na krajevima druge nadopunjuju štap mora biti podešen da se vrti u smjeru suprotnom od kazaljke na satu. smjer.
Pogledajte gornju simulaciju kako biste ispravno razumjeli protudjelotvorno kretanje motora koje bi moglo biti potrebno dodijeliti motorima kako bi se osiguralo uravnoteženo snimanje
Kako kontrolirati smjer quadcopter-a kontrolirajući brzinu motora.
Da, smjer leta quadcopter-a može se prilagoditi i kontrolirati prema vlastitoj želji i volji jednostavnom primjenom različitih brzina (RPM-a) na dotične motore.
Sljedeće slike pokazuju kako se prijenos osnovne brzine može primijeniti na relevantne motore kako bi se postigao i izvršio bilo koji željeni smjer letenja do stroja:




Kao što je naznačeno u gornjim dijagramima, odgovarajućim smanjenjem brzine skupa motora ili povećanjem brzine suprotnog seta motora ili prilagođavanjem brzina prema vlastitim željama, quadcopter se može natjerati da putuje zrakom u bilo kojem željeni specifični smjer.
Gornje slike ukazuju na osnovne smjerove, poput naprijed, natrag, udesno, ulijevo itd. ... međutim bilo koji drugi neobičan smjer također se može učinkovito primijeniti prikladnim podešavanjem brzina relevantnih motora ili može biti samo jedan motor.
Na primjer, kako bi se stroj prisilio letjeti prema smjeru S / Z, može se povećati brzina samo S / E motora, a za omogućavanje stroju da leti u smjeru N / E, brzina S / W motor se može povećati ... i tako dalje. Potrebno je samo vježbati dok potpuna kontrola kvadrokoptera ne postane dostižna i dok korisnik ne ovlada njome.
Dizajniranje praktičnog quadcopter-a
Do sada smo učili o osnovnoj konstrukciji tijela drona i hardveru, a sada naučimo kako brzo i jeftino izraditi quadcopter ili krug drona koristeći vrlo obične komponente. U jednom od mojih ranijih postova naučili smo kako napraviti relativno složen i stoga učinkovit leteći stroj s kvadrokopterima bez upotrebe mikrokontrolera, za više informacija biste željeli proći kroz sljedeće postove:
Krug daljinskog upravljača bez MCU | Elektronički sklop
U ovom članku gornji dizajn pokušavamo učiniti mnogo jednostavnijim uklanjanjem motora bez četkica i zamjenom motora s četkicama, a time i rješavanjem složenog Modul kruga BLDC upravljačkog programa .
Budući da su detalji mehaničke konstrukcije quadcopter-a već opsežno gore raspravljeni, mi ćemo se pozabaviti samo odjeljkom o dizajnu kruga i naučiti kako se on može graditi za letenje predloženim najjednostavnijim krugom dronova.
Kao što je ranije spomenuto, ovaj jednostavni quadcopter zahtijeva samo osnovne RF daljinske upravljačke module kao što je prikazano na donjoj primjeru slike:

Morat ćete kupite ove RF module iz bilo koje internetske trgovine ili od vašeg lokalnog distributera elektroničkih rezervnih dijelova:
Osim gore spomenutog RF daljinski moduli Također će biti potrebna 4 motora s četkanim permanentnim magnetom što zapravo čini srce drona. Može biti onako kako je navedeno na sljedećoj slici s danim opisima ili bilo koje drugo slično prema potrebnim korisničkim specifikacijama:

Električne specifikacije motora:
- 6V = radni napon (vršni 12V)
- 200mA = radna struja
- 10.000 = o / min
Popis dijelova
- 1K, 10K 1/4 vata = 1 svaki
- Kondenzator 1uF / 25V = 1no
- Unaprijed postavljeno 10K ili 5K = 1no
- Rx = žičani otpor od 5 W, vrijednost koju treba potvrditi eksperimentom.
- IC 555 = 1br
- 1N4148 Diode = 2nos
- IRF9540 Mosfet = 1br
- 6V motor četkani tip = 4nos
- Fleksibilne žice, lem, tok itd.
- PCB opće namjene za sastavljanje gornjih dijelova
- 4-kanalni RF daljinski upravljački modul, kao što je prikazano na odgovarajućim slikama.
- Aluminijski kanali, vijci, matice, ploče itd. Kako je objašnjeno u članku.
- Baterija kao što je prikazano dolje:

Kako konfigurirati prijemnik daljinskog upravljača s motorima
Prije razumijevanja kako konfigurirati prijamnik daljinskog upravljača s motorima quadcopter, bilo bi važno naučiti kako bi se trebale prilagoditi ili poravnati brzine motora za generiranje potrebnih kretanja lijevo, desno, naprijed i natrag.
Prvenstveno postoje dva načina na koja se quadcopter može omogućiti za kretanje, a to su u modovima '+' i 'x'. U našem dizajnu koristimo osnovni '+' način kretanja za naš dron, kako je prikazano na sljedećem dijagramu:

Pozivajući se na gornji dijagram, shvaćamo da jednostavno trebamo na odgovarajući način povećati brzine relevantnih motora za izvođenje željenih smjernih smjernica na bespilotnoj letjelici.
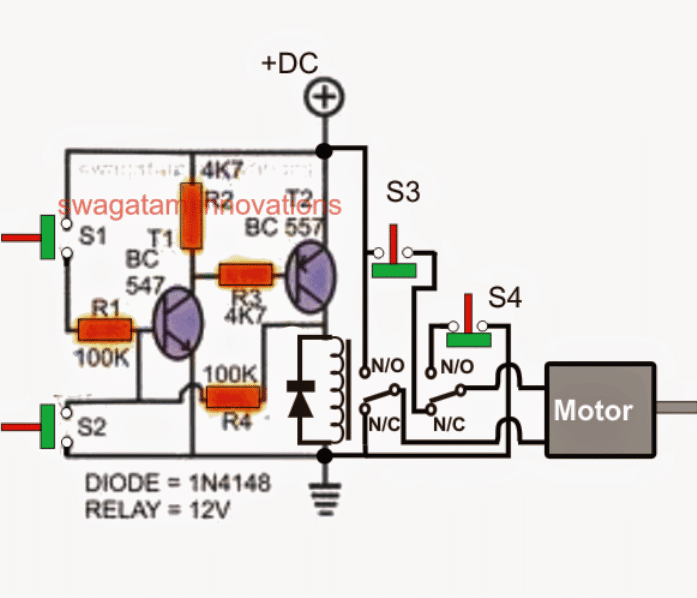
Ovo povećanje brzine može se postići konfiguriranjem releja daljinskog upravljača prema sljedećem dijagramu ožičenja. Na donjem dijagramu možemo vidjeti IC 555 PWM krug ožičen s 4 releja modula prijemnika daljinskog upravljanja od 6 releja (1 relej je neiskorišten i mogao bi se jednostavno ukloniti radi obrazovanja prostora i težine).
Podešavanje PWM-a
Kao što se može vidjeti na dijagramu, PWM napajanje povezano je sa svim N / C kontaktima releja, što podrazumijeva da bi obično quadcopter lebdio kroz ovaj jednoliki i jednaki PWM feed, čiji se radni ciklus može u početku prilagoditi tako da quadcopter je u stanju postići točno navedenu količinu potiska i nadmorske visine.
To se može eksperimentirati prikladnim podešavanjem prikazanog PWM lonca.
Kako konfigurirati relejne kontakte
N / O kontakti releja mogu se vidjeti ožičeni izravno s pozitivnim napajanjem, pa kad god se na daljinskoj slušalici daljinskog upravljača pritisne odgovarajuća tipka, odgovarajući relej aktivira se u modulu prijemnika, što zauzvrat omogućuje relevantnom motoru da dobije punih 12V napajanja iz baterije.
Gore navedeni postupak omogućuje aktiviranom motoru da postigne veću brzinu od ostalih motora što omogućava kvadrokopteru da se kreće prema zadanom smjeru.
Čim se daljinski gumb otpusti, dron se trenutno zaustavlja i nastavlja lebdjeti u stalnom načinu rada.
Jednako se tako i drugi usmjereni pokreti mogu jednostavno postići pritiskom ostalih dodijeljenih gumba na udaljenoj slušalici.
Najviši relej je za osiguravanje sigurnog slijetanja stroja, to se postiže dodavanjem trenutnog otpornika koji pada u seriji s N / O kontaktom prikazanog releja.
Vrijednost ovog otpora mora se izračunati nekim eksperimentiranjem tako da kvadrokopter lebdi oko dva metra iznad tla kad god se ovaj otpor prebacuje kroz priključeni relej.
Kružni dijagram

Prikazani releji dio su prijemnika RF modula, čiji su kontakti u početku nepovezani (prema zadanim postavkama prazni) i treba ih ožičiti kako je prikazano na gornjem dijagramu.
RF daljinski prijamnik trebao bi biti instaliran unutar quadcopter-a i njegovi su releji ožičeni odgovarajućim motorima i baterijom prema gore prikazanom rasporedu.
Možete vidjeti nekoliko konektora (zelene boje) koji bespotrebno mogu dodati težinu dronu. Sve ih možete ukloniti da biste smanjili težinu, a odgovarajuće žice lemom spojite izravno na PCB.
Kako se kreće dron:
Kao što je objašnjeno u gornjoj raspravi, kada se pritisne određena daljinska tipka, on aktivira odgovarajući relej modula quadcopter uzrokujući brže kretanje relevantnog motora.
Ova operacija zauzvrat prisiljava stroj da se kreće u smjeru suprotnom od motora koji se uključuje da se okreće bržim okretajem u minuti.
Tako na primjer, povećanje brzine južnog motora uzrokuje pomicanje stroja prema sjeveru, povećanje sjevernog motora uzrokuje pomicanje prema jugu, slično povećanje istočne brzine motora kreće se prema zapadu i obrnuto.
Zanimljivo je da povećanje motora jug / istok omogućuje kvadrokopteru kretanje prema suprotnom sjeveru / zapadu koji je u dijagonalnom načinu .... i tako dalje.
Prednosti i nedostaci gore objašnjenog jednostavnog kruga daljinskog upravljanja Qaudcopter.
Pros
- Jeftin i jednostavan za izradu čak i od relativno novog hobista.
- Ne zahtijeva složene radnje džojstika.
- Može se kontrolirati pomoću jednog 6-kanalnog modula daljinskog upravljanja
Protiv
- Manje učinkovit u smislu izrade sigurnosne kopije baterije zbog sudjelovanja četkanih motora
- Brzina smjera je stalna i ne može se mijenjati putem daljinske upravljačke slušalice
- Manevriranje možda neće biti glatko, pomalo trzavo dok mijenjate tipke.
Prethodno: Objašnjeni otpornik za osjet sile Dalje: Kapacitivni razdjelnik napona