
Kao što i samo ime govori, ovaj će članak dati preciznu ideju o strukturi i radu PID kontrolera. Međutim, ulazimo u detalje, neka nam je uvod o PID kontrolerima. PID kontroleri se nalaze u širokom spektru aplikacija za upravljanje industrijskim procesima. Otprilike 95% operacija zatvorene petlje industrijska automatizacija sektor koriste PID kontrolere. PID je skraćenica od Proporcionalno-integralni-izvedeni. Ova tri regulatora kombinirana su na takav način da proizvode upravljački signal. Kao kontroler povratne sprege, isporučuje upravljački izlaz na željenim razinama. Prije izuma mikroprocesora, analogne elektroničke komponente provodile su PID kontrolu. Ali danas svi PID kontroleri obrađuju mikroprocesori. Programabilni logički kontroleri također imaju ugrađene upute PID kontrolera. Zbog fleksibilnosti i pouzdanosti PID regulatora, oni se tradicionalno koriste u aplikacijama za upravljanje procesima.
Što je PID kontroler?
Izraz PID označava proporcionalni integralni derivat i to je jedna vrsta uređaja koji se koristi za kontrolu različitih procesnih varijabli poput tlaka, protoka, temperature i brzine u industrijskim primjenama. U ovom se regulatoru koristi uređaj za povratnu vezu kontrolne petlje za regulaciju svih procesnih varijabli.
Ova vrsta upravljanja koristi se za pogon sustava u smjeru ciljnog mjesta koje je inače na razini. Gotovo je svugdje za kontrolu temperature i koristi se u znanstvenim procesima, automatizaciji i bezbrojnim kemikalijama. U ovom se regulatoru povratna sprega zatvorene petlje koristi za održavanje stvarnog izlaza iz metode poput blizine cilja, inače izlaza na fiksnoj točki, ako je moguće. U ovom se članku raspravlja o dizajnu PID regulatora s načinima upravljanja koji se koriste u njima poput P, I & D.
Povijest
Povijest PID kontrolera je, 1911. godine, Elmer Sperry razvio je prvi PID regulator. Nakon toga, TIC (Taylor Instrumental Company) implementiran je bivši pneumatski regulator s potpuno prilagodljivim 1933. god. Nakon nekoliko godina, kontrolni inženjeri uklonili su pogrešku stabilnog stanja koja se nalazi unutar proporcionalnih regulatora ponovnim postavljanjem kraja na neku lažnu vrijednost dok pogreška nije bila nula.
Ova ponovna postavka uključivala je pogrešku koja je poznata kao proporcionalno-integralni kontroler. Nakon toga, 1940. godine, razvijen je prvi pneumatski PID regulator izvedenom izvedbom radi smanjenja problema s pretjerivanjem.
1942. godine Ziegler & Nichols uveli su pravila podešavanja kako bi inženjeri otkrili i postavili prikladne parametre PID regulatora. Napokon, automatski PID regulatori intenzivno su se koristili u industriji sredinom 1950.
Blok dijagram PID kontrolera
Sustav zatvorene petlje poput PID regulatora uključuje sustav upravljanja povratnim informacijama. Ovaj sustav procjenjuje varijablu povratne sprege pomoću fiksne točke kako bi generirao signal pogreške. Na temelju toga, mijenja izlaz sustava. Ovaj će se postupak nastaviti dok pogreška ne dosegne nulu, inače vrijednost varijable povratne sprege postane ekvivalentna fiksnoj točki.
Ovaj regulator daje dobre rezultate u usporedbi s onim tipkama ON / OFF. U upravljaču tipa ON / OFF dostupna su samo dva uvjeta za upravljanje sustavom. Jednom kada je vrijednost procesa niža od fiksne točke, tada će se UKLJUČITI. Slično tome, ISKLJUČIT će se kada je vrijednost veća od fiksne vrijednosti. Izlaz nije stabilan kod ove vrste regulatora i često će se njihati u području fiksne točke. Međutim, ovaj kontroler je stabilniji i precizniji u usporedbi s onim tipkama ON / OFF.

Rad PID regulatora
Rad PID kontrolera
Korištenjem jeftinog jednostavnog ON-OFF regulatora moguća su samo dva stanja upravljanja, poput potpuno UKLJUČENO ili potpuno ISKLJUČENO. Koristi se za ograničenu kontrolnu aplikaciju gdje su ova dva kontrolna stanja dovoljna za kontrolni cilj. Međutim, oscilacijska priroda ove kontrole ograničava njezinu uporabu i stoga je zamjenjuje PID kontrolerima.
PID regulator održava izlaz tako da postoji nulta pogreška između procesne varijable i zadane vrijednosti / željenog izlaza operacijama zatvorene petlje. PID koristi tri osnovna kontrolna ponašanja koja su objašnjena u nastavku.
P- kontroler
Proporcionalni ili P-regulator daje izlaz koji je proporcionalan trenutnoj pogrešci e (t). Uspoređuje željenu ili zadanu vrijednost sa stvarnom vrijednošću ili vrijednošću procesa povratne informacije. Dobivena pogreška množi se proporcionalnom konstantom da bi se dobio izlaz. Ako je vrijednost pogreške nula, tada je ovaj izlaz regulatora nula.

P-kontroler
Ovaj regulator zahtijeva pristranost ili ručno resetiranje kada se koristi sam. To je zato što nikada ne postiže stabilno stanje. Pruža stabilan rad, ali uvijek održava pogrešku u stabilnom stanju. Brzina odziva povećava se kada se proporcionalna konstanta Kc povećava.

Odgovor P-kontrolera
I-kontroler
Zbog ograničenja p-regulatora gdje uvijek postoji pomak između procesne varijable i zadane vrijednosti, potreban je I-regulator koji pruža potrebne radnje za uklanjanje pogreške u stalnom stanju. Integrira pogrešku tijekom određenog vremenskog razdoblja dok vrijednost pogreške ne dosegne nulu. Drži vrijednost na zadnjem upravljačkom uređaju pri kojem pogreška postaje nula.

PI kontroler
Integralna kontrola smanjuje svoj izlaz kad se dogodi negativna pogreška. Ograničava brzinu odgovora i utječe na stabilnost sustava. Brzina odziva povećava se smanjenjem integralnog pojačanja, Ki.

Odgovor PI kontrolera
Na gornjoj slici, kako se pojačanje I-regulatora smanjuje, pogreška u stalnom stanju također se smanjuje. U većini slučajeva koristi se PI kontroler posebno tamo gdje nije potreban odziv velike brzine.
Dok se koristi PI kontroler, izlaz I-regulatora ograničen je na donekle doseg za prevladavanje integralni vjetar uvjeti u kojima se integralni izlaz nastavlja povećavati čak i kod nultog stanja pogreške, zbog nelinearnosti u postrojenju.
D-kontroler
I-kontrolor nema mogućnost predviđanja budućeg ponašanja pogreške. Dakle, normalno reagira kad se promijeni zadana vrijednost. D-regulator prevladava ovaj problem predviđajući buduće ponašanje pogreške. Njegov izlaz ovisi o brzini promjene pogreške s obzirom na vrijeme, pomnoženoj s izvedenom konstantom. Omogućuje pokretanje izlaza, čime se povećava odziv sustava.

PID kontroler
Na gornjoj slici odgovora D, kontroler je veći u odnosu na PI regulator, a smanjuje se i vrijeme smirivanja izlaza. Poboljšava stabilnost sustava kompenziranjem faznog zaostajanja uzrokovanog I-regulatorom. Povećanje derivatnog pojačanja povećava brzinu odziva.

Odgovor PID kontrolera
Napokon smo primijetili da kombiniranjem ova tri kontrolera možemo dobiti željeni odgovor za sustav. Različiti proizvođači dizajniraju različite PID algoritme.
Vrste PID kontrolera
PID kontroleri su klasificirani u tri vrste poput ON / OFF, proporcionalni i standardni tip regulatora. Ovi kontroleri koriste se na temelju upravljačkog sustava, a korisnik može koristiti regulator za regulaciju metode.
ON / OFF kontrola
Način upravljanja uključivanjem i isključivanjem najjednostavnija je vrsta uređaja koji se koristi za kontrolu temperature. Izlaz uređaja može biti UKLJUČEN / ISKLJUČEN bez središnjeg stanja. Ovaj regulator će uključiti izlaz jednostavno kad temperatura prijeđe fiksnu točku. Granični kontroler je jedna posebna vrsta ON / OFF regulatora koji koristi zasun. Ovaj se relej resetira ručno i koristi se za isključivanje metode nakon postizanja određene temperature.
Proporcionalna kontrola
Ova vrsta kontrolera dizajnirana je za uklanjanje ciklusa koji je povezan preko ON / OFF kontrole. Ovaj PID regulator smanjit će normalnu snagu koja se napaja prema grijaču kada temperatura dosegne fiksnu točku.
Ovaj regulator ima jednu značajku za upravljanje grijačem tako da neće premašiti fiksnu točku, ali će dostići fiksnu točku kako bi održavao stabilnu temperaturu.
Taj se omjer proporcionalnosti može postići UKLJUČIVANJEM / ISKLJUČIVANJEM izlaza za mala vremenska razdoblja. Ovo proporcioniranje vremena promijenit će omjer iz vremena UKLJ. U vrijeme ISKLJ. Za kontrolu temperature.
Standardni tip PID kontroler
Ova vrsta PID regulatora spojit će proporcionalnu kontrolu kroz integriranu i izvedenu kontrolu kako bi automatski pomogla jedinici da nadoknadi promjene unutar sustava. Te modifikacije, integralne i izvedene izražene su u vremenski utemeljenim jedinicama.
Ovi se kontrolori također upućuju kroz njihove recipročne vrijednosti, RATE & RESET (Sukladno tome, OCIJENI I PONOVNO PONOVO). Uvjeti PID-a moraju se zasebno prilagoditi, inače prilagoditi određenom sustavu uz suđenje, kao i pogrešku. Ovi kontroleri ponudit će najprecizniju i najstabilniju kontrolu od 3 vrste kontrolera.
PID kontroleri u stvarnom vremenu
Trenutno postoje razne vrste PID kontrolera dostupnih na tržištu. Ovi se regulatori koriste za industrijske zahtjeve upravljanja poput tlaka, temperature, razine i protoka. Jednom kada se ti parametri kontroliraju putem PID-a, odabiri uključuju upotrebu zasebnog PID regulatora ili bilo kojeg PLC-a.
Ovi odvojeni kontroleri koriste se gdje god je u protivnom potrebno provjeriti dvije petlje, kao i kontrolirati ih u suprotnom, u uvjetima gdje god je to složeno s pravom ulaska kroz veće sustave.
Ovi upravljački uređaji pružaju različite mogućnosti za solo i dvostruku petlju upravljanja. Samostalni PID kontroleri pružaju nekoliko konfiguracija s fiksnom točkom za proizvodnju autonomnih nekoliko alarma.
Ovi samostalni kontroleri uglavnom se sastoje od PID regulatora tvrtke Honeywell, regulatora temperature tvrtke Yokogawa, regulatora automatskog podešavanja tvrtke OMEGA, Siemens i ABB.
PLC-ovi se koriste poput PID-regulatora u većini aplikacija za industrijsku kontrolu. Raspored PID-blokova može se izvršiti unutar PAC-a ili PLC-a kako bi se pružili vrhunski izbori za točnu PLC kontrolu. Ovi su kontroleri pametniji i snažniji u usporedbi s zasebnim kontrolerima. Svaki PLC uključuje PID blok unutar programskog programiranja.
Metode ugađanja
Prije nego što se dogodi rad PID regulatora, on mora biti podešen tako da odgovara dinamici procesa koji treba kontrolirati. Dizajneri daju zadane vrijednosti za pojmove P, I i D, a te vrijednosti ne mogu dati željene performanse, a ponekad dovode do nestabilnosti i usporenih performansi upravljanja. Različite vrste metoda podešavanja razvijene su za podešavanje PID regulatora i zahtijevaju veliku pažnju operatera za odabir najboljih vrijednosti proporcionalnih, integralnih i izvedenih dobitaka. Neki od njih dati su u nastavku.
PID kontroleri se koriste u većini industrijskih aplikacija, ali treba znati postavke ovog regulatora kako biste ga ispravno prilagodili kako bi generirali željeni izlaz. Ovdje ugađanje nije ništa drugo nego postupak primanja idealnog odgovora od regulatora postavljanjem najboljih proporcionalnih dobitaka, integralnih i izvedenih faktora.
Željeni izlaz PID regulatora može se dobiti podešavanjem regulatora. Dostupne su različite tehnike za dobivanje potrebnih rezultata iz regulatora poput pokušaja i pogrešaka, Zeigler-Nichols-a i krivulje reakcije procesa. Najčešće korištene metode su pokušaj i pogreška, Zeigler-Nichols itd.
Način pokušaja i pogreške: To je jednostavna metoda podešavanja PID regulatora. Dok sustav ili kontroler radi, možemo podesiti kontroler. U ovoj metodi prvo moramo postaviti vrijednosti Ki i Kd na nulu i povećavati proporcionalni pojam (Kp) dok sustav ne postigne oscilirajuće ponašanje. Jednom kad oscilira, prilagodite Ki (integralni pojam) tako da oscilacije prestanu i na kraju prilagodite D da biste dobili brzi odgovor.
Tehnika krivulje reakcije procesa: To je tehnika podešavanja otvorene petlje. Proizvodi odgovor kad se na sustav primijeni korak unosa. U početku moramo ručno primijeniti neki upravljački izlaz na sustav i moramo zabilježiti krivulju odgovora.
Nakon toga moramo izračunati nagib, mrtvo vrijeme, vrijeme porasta krivulje i na kraju zamijeniti ove vrijednosti u jednadžbama P, I i D da bismo dobili vrijednosti dobitka PID članaka.

Krivulja reakcije procesa
Zeigler-Nicholsova metoda: Zeigler-Nichols predložio je metode zatvorene petlje za podešavanje PID regulatora. To su metoda kontinuiranog bicikliranja i metoda prigušenih oscilacija. Postupci za obje metode su isti, ali ponašanje oscilacija je različito. U tome, prvo, moramo postaviti konstantu p-regulatora, Kp na određenu vrijednost, dok su vrijednosti Ki i Kd nula. Proporcionalno pojačanje se povećava dok sustav ne oscilira konstantnom amplitudom.
Dobitak u kojem sustav proizvodi konstantne oscilacije naziva se krajnji dobitak (Ku), a razdoblje oscilacija naziva se krajnje razdoblje (Pc). Jednom kad se postigne, možemo unijeti vrijednosti P, I i D u PID regulator po Zeigler-Nicholsovoj tablici, ovisno o korištenom kontroleru poput P, PI ili PID, kao što je prikazano u nastavku.

Zeigler-Nicholsov stol
Struktura PID kontrolera
PID regulator sastoji se od tri pojma, i to proporcionalne, integralne i izvedene kontrole. Kombinirani rad ova tri regulatora daje strategiju upravljanja za kontrolu procesa. PID regulator manipulira procesnim varijablama poput tlaka, brzine, temperature, protoka itd. Neke od aplikacija koriste PID kontrolere u kaskadnim mrežama gdje se za postizanje kontrole koriste dva ili više PID-a.

Struktura PID kontrolera
Gornja slika prikazuje strukturu PID regulatora. Sastoji se od PID bloka koji daje svoj izlaz procesnom bloku. Proces / postrojenje sastoji se od završnih upravljačkih uređaja poput aktuatora, upravljačkih ventila i ostalih upravljačkih uređaja za upravljanje različitim procesima industrije / postrojenja.
Signal povratne sprege iz procesnog postrojenja uspoređuje se s postavljenom točkom ili referentnim signalom u (t) i odgovarajući signal pogreške e (t) dovodi se u PID algoritam. Prema proporcionalnim, integralnim i izvedenim upravljačkim proračunima u algoritmu, regulator daje kombinirani odziv ili kontrolirani izlaz koji se primjenjuje na uređaje za upravljanje postrojenjem.
Sve upravljačke aplikacije ne trebaju sva tri upravljačka elementa. Kombinacije poput PI i PD kontrola vrlo se često koriste u praktičnoj primjeni.
Prijave
Primjene PID regulatora uključuju sljedeće.
Najbolja primjena PID regulatora je kontrola temperature gdje regulator koristi ulaz osjetnika temperature i njegov se izlaz može povezati s upravljačkim elementom poput ventilatora ili grijača. Općenito, ovaj regulator je jednostavno jedan od elemenata u sustavu za kontrolu temperature. Čitav sustav mora se ispitati i razmotriti prilikom odabira pravog regulatora.
Regulacija temperature peći
Općenito, peći se koriste za grijanje, a sadrže i ogromnu količinu sirovine na ogromnim temperaturama. Uobičajeno je da zauzeti materijal uključuje veliku masu. Slijedom toga, potrebna je velika količina tromosti, a temperatura materijala se ne mijenja brzo čak i kada se primijeni velika toplina. Ova značajka rezultira umjereno stabilnim PV signalom i omogućuje razdoblje izvedenosti da učinkovito ispravi kvar bez ekstremnih promjena na FCE ili CO.
MPPT kontroler punjenja
V-I karakteristika fotonaponske ćelije uglavnom ovisi o rasponu temperature, kao i o zračenju. Na temelju vremenskih uvjeta, struja i radni napon će se stalno mijenjati. Dakle, izuzetno je značajno pratiti najviši PowerPoint učinkovitog fotonaponskog sustava. PID regulator koristi se za pronalaženje MPPT davanjem PID regulatora točaka fiksnog napona i struje. Jednom kada se vremenske prilike promijene, tragač održava stabilnost struje i napona.
Pretvarač energetske elektronike
Znamo da je pretvarač aplikacija energetske elektronike, pa se PID regulator najčešće koristi u pretvaračima. Kad god se pretvarač poveže kroz sustav koji se temelji na promjeni unutar opterećenja, tada će se mijenjati izlaz pretvarača. Primjerice, pretvarač je povezan s opterećenjem koje se napaja velikom strujom kada se povećaju opterećenja. Dakle, parametar napona kao i struja nije stabilan, ali će se mijenjati na temelju zahtjeva.
U ovom stanju, ovaj regulator će generirati PWM signale za aktiviranje IGBT pretvarača. Na temelju promjene unutar opterećenja, signal odziva daje se PID regulatoru tako da će proizvesti n pogreške. Ti se signali generiraju na temelju signala kvara. U ovom stanju možemo dobiti promjenjivi ulaz i izlaz putem sličnog pretvarača.
Primjena PID kontrolera: Regulacija zatvorene petlje za istosmjerni motor bez četkica
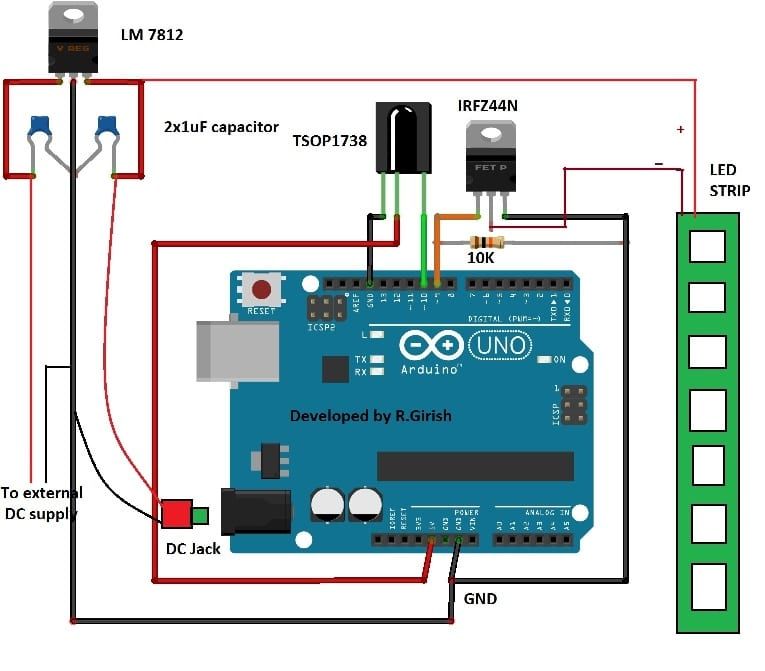
Sučelje PID kontrolera
Dizajn i povezivanje PID regulatora mogu se izvršiti pomoću Arduino mikrokontrolera. U laboratoriju je PID kontroler zasnovan na Arduinu dizajniran pomoću ploče Arduino UNO, elektroničkih komponenata, termoelektričnog hladnjaka, dok su programski jezici koji se koriste u ovom sustavu C ili C ++. Ovaj se sustav koristi za kontrolu temperature u laboratoriju.
Parametri PID-a za određeni regulator nalaze se fizički. Funkcija različitih PID parametara može se implementirati kroz naknadni kontrast između različitih oblika regulatora.
Ovaj sustav povezivanja može učinkovito izračunati temperaturu kroz pogrešku od ± 0,6 ℃, dok se konstantna temperatura regulira kroz samo malu razliku od željene vrijednosti. Koncepti korišteni u ovom sustavu pružit će jeftine, kao i točne tehnike za upravljanje fizičkim parametrima u željenom rasponu unutar laboratorija.
Stoga ovaj članak raspravlja o pregledu PID regulatora koji uključuje povijest, blok dijagram, strukturu, vrste, rad, metode podešavanja, povezivanje, prednosti i aplikacije. Nadamo se da smo uspjeli pružiti osnovno, a precizno znanje o PID kontrolerima. Evo jednostavnog pitanja za sve vas. Među različitim metodama podešavanja, koja se metoda koristi za postizanje optimalnog rada PID regulatora i zašto?
Molimo vas da svoje odgovore date u odjeljku za komentare u nastavku.
Foto bodovi
Blok dijagram PID regulatora od wikimedia
Struktura PID regulatora, P-regulator, P - odziv regulatora i PID kontroler od strane blog.opticontrols
P - odgovor regulatora od strane kontrole.engin.umich
Odgovor PI-regulatora od strane m. jesti
Odgovor PID kontrolera od wikimedia
Zeigler-Nicholsov stol autora kontrole.engin




{kind=link}
{kind=link}
{kind=link}
{kind=link}