U ovom ćemo članku pokušati razumjeti kako se implementira skalarni algoritam upravljanja za kontrolu brzine asinhronog motora s relativno jednostavnim proračunima, a opet postići razumno dobru linearno promjenjivu kontrolu brzine motora.

Izvješća mnogih vrhunskih analiza tržišta to otkrivaju asinhroni motori su najpopularniji kada je riječ o rukovanju teškim industrijskim aplikacijama i poslovima povezanim s motorima. Glavni razlozi popularnosti indukcijskih motora uglavnom su zbog visokog stupnja robusnosti, veće pouzdanosti u pogledu habanja i usporedno visoke funkcionalne učinkovitosti.
Ipak, asinhroni motori imaju jedan tipičan nedostatak, jer ih nije lako kontrolirati uobičajenim konvencionalnim metodama. Upravljanje asinkronim motorima relativno je zahtjevno zbog svoje prilično složene matematičke konfiguracije, koja prvenstveno uključuje:
- Nelinearni odziv pri zasićenju jezgre
- Nestabilnost oscilacija oblika zbog promjenjive temperature namota.
Zbog ovih kritičnih aspekata, implementacija upravljanja indukcijskim motorom optimalno zahtijeva temeljito proračunat algoritam s visokom pouzdanošću, na primjer korištenjem metode 'vektorske kontrole', a dodatno i pomoću sustava za obradu temeljenog na mikrokontroleru.
Razumijevanje primjene skalarne kontrole
Međutim, postoji još jedna metoda koja se može primijeniti za provođenje upravljanja indukcijskim motorom koristeći puno lakšu konfiguraciju, to je skalarna kontrola koja uključuje nevektorske pogonske tehnike.
Zapravo je moguće indukcijski motor naizmjenične struje omogućiti u ustaljenom stanju radeći ga s izravnim povratnim naponom i sustavima kontroliranim strujom.
U ovoj skalarnoj metodi skalarna varijabla može se podesiti kada se postigne njena prava vrijednost eksperimentiranjem u praksi ili putem prikladnih formula i izračuna.
Dalje, ovo se mjerenje može koristiti za provođenje upravljanja motorom putem kruga otvorene petlje ili kroz topologiju zatvorene povratne petlje.
Iako skalarna metoda upravljanja obećava relativno dobre ustaljene rezultate na motoru, njegov privremeni odziv možda neće biti na dobrom nivou.
Kako rade indukcijski motori
Riječ 'indukcija' u asinhronim motorima odnosi se na jedinstveni način njegovog rada u kojem magnetiziranje rotora statorskim namotom postaje ključni aspekt rada.
Kada se AC primijeni preko namota statora, oscilirajuće magnetsko polje iz namota statora djeluje s armaturom rotora stvarajući novo magnetsko polje na rotoru, koje zauzvrat reagira s magnetskim poljem statora inducirajući veliku količinu rotacijskog momenta na rotoru . Ovaj okretni moment daje stroju potreban učinkovit mehanički učinak.
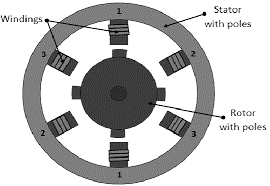
Što je 3-fazni indukcijski motor s vjevericama u kavezu
To je najpopularnija varijanta asinhronih motora i široko se koristi u industrijskoj primjeni. U indukcijskom motoru s kavezom od vjeverica, rotor nosi niz vodiča poput šipki koji okružuju os rotora, predstavljajući jedinstvenu kaveznu strukturu i otuda naziv 'kavez s vjevericama'.
Ove šipke u kosom obliku koje vode oko osi rotora pričvršćene su debelim i čvrstim metalnim prstenima na krajevima šipki. Ovi metalni prstenovi ne samo da pomažu čvrsto učvrstiti šipke na svom mjestu, već i prisiljavaju bitni električni kratki spoj preko šipki.
Kada se statorski namot primijeni sekvencijskim 3-faznim sinusnim izmjeničnim strujama, rezultirajuće magnetsko polje također se počinje kretati istom brzinom kao i 3-fazna sinusna frekvencija statora (ωs).
Budući da se sklop rotora kaveznog vjetra nalazi unutar namota statora, gornje izmjenično trofazno magnetsko polje od namota statora reagira s rotorskim sklopom inducirajući ekvivalentno magnetsko polje na vodilicama šipke kaveznog sklopa.
To prisiljava sekundarno magnetsko polje da se nakuplja oko šipki rotora, i prema tome je ovo novo magnetsko polje prisiljeno na interakciju sa statorskim poljem, prisiljavajući rotacijski moment na rotoru koji pokušava slijediti smjer magnetskog polja statora.

U tom procesu brzina rotora pokušava postići frekvenciju statora, a kako se približava brzini sinkronog magnetskog polja statora, relativna razlika brzine e između brzine statora i brzine rotacije rotora počinje se smanjivati, što uzrokuje smanjenje magnetskog interakcija magnetskog polja rotora preko magnetskog polja statora, na kraju smanjujući moment na rotoru i ekvivalentnu izlaznu snagu rotora.
To dovodi do minimalne snage na rotoru i pri toj brzini se kaže da je rotor stekao stabilno stanje, pri čemu je opterećenje na rotoru ekvivalentno i odgovara momentu na rotoru.
Rad asinhronog motora kao odgovor na opterećenje može se sažeti kako je objašnjeno u nastavku:
Budući da postaje obvezno održavati finu razliku između brzine rotora (osovine) i brzine unutarnje frekvencije statora, brzina rotora koja zapravo upravlja opterećenjem, okreće se malo smanjenom brzinom od frekvencije statora. Suprotno tome, ako pretpostavimo da se stator primjenjuje s 3-faznim napajanjem od 50 Hz, tada će kutna brzina te frekvencije od 50 Hz na namotu statora biti uvijek malo veća od odziva brzine vrtnje rotora, što se u biti održava kako bi se osigurala optimalna snaga na rotoru.
Što je klizanje u asinhronom motoru
Relativna razlika između kutne brzine statora i brzine rotacije koja reagira na rotor naziva se 'klizanjem'. Proklizavanje mora biti prisutno čak i u situacijama kada se motorom upravlja prema strategiji usmjerenoj na polje.
Budući da osovina rotora u indukcijskim motorima ne ovisi o bilo kakvoj vanjskoj pobudi za njegovo okretanje, može raditi bez konvencionalnih kliznih prstenova ili četkica, osiguravajući gotovo nula habanja, visoku učinkovitost, a opet jeftina sa svojim održavanjem.
Faktor momenta kod ovih motora određuje se kutom utvrđenim između magnetskih tokova statora i rotora.
Gledajući donji dijagram, možemo vidjeti da je brzina rotora dodijeljena kao Ω, a frekvencije na statoru i rotoru određene su parametrom 's' ili klizanjem, predstavljenim formulom:
s = ( ω s - ω r ) / ω s
U gornjem izrazu, s je 'klizanje' koje pokazuje razliku između brzine sinkrove frekvencije statora i stvarne brzine motora razvijene na osovini rotora.

Razumijevanje teorije skalarne regulacije brzine
U konceptima upravljanja asinhronim motorom gdje Tehnički V / Hz se koristi, kontrola brzine provodi se podešavanjem napona statora s obzirom na frekvenciju tako da protok zračnog raspora nikada ne može odstupati izvan očekivanog raspona ustaljenog stanja, drugim riječima održava se unutar ovog procijenjenog stacionarnog stanja vrijednost, pa se stoga naziva i skalarna kontrola metoda jer tehnika u velikoj mjeri ovisi o ustaljenoj dinamici upravljanja brzinom motora.
Rad ovog koncepta možemo razumjeti pozivanjem na sljedeću sliku koja prikazuje pojednostavljenu shemu skalarne tehnike upravljanja. U postavljanju se pretpostavlja da je otpor statora (Rs) jednak nuli, dok je induktivitet propuštanja statora (LI) utisnut na propuštanje rotora i induktivitet magnetiziranja (LIr). Može se vidjeti da je (LIr) koji zapravo prikazuje veličinu protoka zračnog raspora potisnut prije ukupne induktivnosti propuštanja (Ll = Lls + Llr).

Zbog toga protok zračnog zazora stvoren strujom magnetiziranja dobiva približno vrijednost blizu omjera frekvencije statora. Tako se izraz fazora za procjenu stabilnog stanja može napisati kako slijedi:

Za indukcijske motore koji mogu raditi na njihovim linearnim magnetskim područjima, Lm se neće mijenjati i ostati konstantan, u takvim slučajevima gornja jednadžba može se izraziti kao:

Gdje su V i Λ vrijednosti napona statora, odnosno fluks statora, dok Ṽ predstavlja parametar fazora u projektu.
Posljednji gornji izraz jasno objašnjava da sve dok se omjer V / f drži konstantnim bez obzira na bilo kakvu promjenu ulazne frekvencije (f), tada protok također ostaje konstantan, što omogućuje da toque radi bez ovisno o frekvenciji napona napajanja . To znači da ako se ifM održava na konstantnoj razini, omjer Vs / ƒ također bi se prikazivao konstantnom relevantnom brzinom. Stoga kad god se poveća brzina motora, napon na namotu statora također će morati biti proporcionalno povećan, kako bi se mogao održavati konstantan Vs / f.
Međutim, ovdje je proklizavanje funkcija opterećenja pričvršćenog na motor, brzina sinkrone frekvencije ne prikazuje stvarnu brzinu motora.
U nedostatku momenta opterećenja na rotoru, rezultirajuće proklizavanje može biti zanemarivo malo, što omogućuje motoru postizanje bliskih sinkronih brzina.
Zbog toga osnovna konfiguracija Vs / f ili V / Hz obično ne mora imati sposobnost provođenja precizne regulacije broja okretaja asinhronog motora kada je motor pričvršćen momentom opterećenja. Međutim, kompenzacija klizanja može se vrlo lako uvesti u sustav zajedno s mjerenjem brzine.
Grafički prikaz dolje jasno prikazuje senzor brzine unutar zatvorenog kruga V / Hz sustava.

U praktičnim izvedbama, omjer napona i frekvencije statora može ovisiti o ocjeni samih parametara.
Analizirajući kontrolu brzine V / Hz
Standardnoj analizi V / Hz može se posvjedočiti na sljedećoj slici.

U osnovi ćete pronaći 3 raspona za odabir brzine unutar V / Hz profila, što se može razumjeti iz sljedećih točaka:
- Se odnosi na slika 4 kada je granična frekvencija u području 0-fc, ulaz napona postaje bitan, što stvara potencijalni pad na namotu statora, a taj pad napona ne može se zanemariti i treba ga nadoknaditi povećanjem napona napajanja Vs. To ukazuje da u ovom području profil omjera V / Hz nije linearna funkcija. Analitički možemo procijeniti graničnu frekvenciju fc za odgovarajuće napone statora uz pomoć ekvivalentnog kruga u stabilnom stanju koji ima Rs ≠ 0.
- U regiji fc-r (nazivni) Hz, on je u stanju izvršiti konstantan odnos Vs / Hz, u ovom slučaju nagib odnosa označava količina protoka zračnog raspora .
- U području izvan f (nazivnog), koje radi na višim frekvencijama, postaje nemoguće provoditi omjer Vs / f konstantnom brzinom, jer u ovom položaju napon statora nastoji biti ograničen na f (nazivnu) vrijednost. To se događa kako bi se osiguralo da namot statora ne bude podvrgnut proboju izolacije. Zbog ove situacije, rezultirajući tok zračnog raspora ima tendenciju da se ugrozi i smanji, što dovodi do odgovarajućeg smanjenja okretnog momenta rotora. Ova radna faza u asinkronim motorima naziva se “Regija slabljenja polja” . Da bi se spriječila ovakva situacija, obično se u tim frekvencijskim opsezima ne poštuje pravilo konstantnog V / Hz.
Zbog prisutnosti konstantnog magnetskog toka statora, bez obzira na promjenu frekvencije namota staora, moment na rotoru sada se mora oslanjati samo na brzinu klizanja, taj se učinak može vidjeti u slika 5 iznad
Uz odgovarajuću regulaciju brzine klizanja, brzina asinkronog motora mogla bi se učinkovito kontrolirati zajedno s obrtnim momentom na opterećenju rotora primjenom konstantnog principa V / Hz.
Stoga, bilo da se radi o otvorenom ili zatvorenom načinu upravljanja brzinom, oboje bi se moglo implementirati pomoću pravila konstantnog V / Hz.
Način upravljanja s otvorenom petljom mogao bi se primijeniti u aplikacijama u kojima preciznost regulacije brzine možda nije važan čimbenik, kao što je u HVAC jedinicama ili uređajima poput ventilatora i puhala. U takvim se slučajevima učestalost opterećenja pronalazi pozivanjem na potrebnu razinu brzine motora, a očekuje se da brzina rotora približno slijedi trenutnu sinkronu brzinu. Bilo koji oblik odstupanja u brzini koji proizlazi iz klizanja motora obično se zanemaruje i prihvaća u takvim primjenama.
Referenca: http://www.ti.com/lit/an/sprabq8/sprabq8.pdf
Prethodno: Razumijevanje pull-up i pull-down otpornika s dijagramima i formulama Dalje: 18650 baterija podataka kapaciteta 2600 mAh i rad