U ovo doba industrijska automatizacija , roboti se koriste za rukovanje raznim procesima za preciznu i bolju kvalitetu proizvodnje. Odabir idealnog motora za savršenog robota uvijek je težak zadatak tijekom dizajniranja robota, posebno za industriju. Pravilan odabir električni motori kod industrijskih robota potrebno je nekoliko parametara kako bi se uzelo u obzir kontrola ruke, položaj, kutni i linearni pokreti.

Motori koji se koriste u industrijskoj robotici
Izbor motora je najmanje razumljiv koncept za hobiste robotike koji zahtijeva strategiju i ozbiljnu analizu. Uključuje određivanje brzine, ubrzanja, zahtjeva okretnog momenta na temelju težine robota, veličine kotača i primjene u kojoj treba biti implementiran. Postoji mnogo vrsta motora dostupni su na današnjem tržištu, ali uglavnom Tiny pager motori, servo motori , linearni motori, koračni motori i motori s istosmjernim prijenosnikom koriste se u industrijskim robotima prema području njihove primjene.
Nepravilan odabir motora završava s hendikepiranim robotom, pa koja je vrsta motora najbolja i najprikladnija da industrijske robote učini stvarnima, preciznima i dovoljnima da zadovolje sve potrebe industrijskog procesa, a imajući na umu sve realne specifikacije?
Ovdje smo prikupili neke uvide o ovim motorima od industrijskih profesionalaca za odabir odgovarajućeg motora koji će se odabrati za industrijsku primjenu.
Potičemo vas da slijedite mišljenja stručnjaka kojima je cilj pružiti najboljim motorima za industrijsku robotiku dostupne istosmjerne, koračne, četkice i servo motore za precizna, isplativa i pouzdana kretanja robota.
Ch.Sampath Kumar
M.tech u VLSI dizajnu
Writer tehničkog sadržaja
 Istosmjerni motori dostupni su u širokom rasponu za kontinuirani rad, ali zahtijeva redukcije stupnja prijenosa na odijela za odgovarajuću primjenu. Koračni motor ne zahtijeva nikakvo smanjenje stupnja prijenosa jer njegov stupnjeviti rad osigurava malu brzinu za određene primjene. Napokon se servo motori koriste za precizno i precizno upravljanje koje se provodi u operacijama zatvorene petlje. Ali zahtijeva dodatne povratne informacije i pogonske sklopove, pa je skup od istosmjernog i koračnog motora. Tako servo motori čine robota pouzdanijim zbog njegovog preciznog kretanja.
Istosmjerni motori dostupni su u širokom rasponu za kontinuirani rad, ali zahtijeva redukcije stupnja prijenosa na odijela za odgovarajuću primjenu. Koračni motor ne zahtijeva nikakvo smanjenje stupnja prijenosa jer njegov stupnjeviti rad osigurava malu brzinu za određene primjene. Napokon se servo motori koriste za precizno i precizno upravljanje koje se provodi u operacijama zatvorene petlje. Ali zahtijeva dodatne povratne informacije i pogonske sklopove, pa je skup od istosmjernog i koračnog motora. Tako servo motori čine robota pouzdanijim zbog njegovog preciznog kretanja.
Viswanath Prathap
M.Tech iz elektroenergetike
Writer tehničkog sadržaja

Izaberite i smjestite Roboti se obično nalaze u industriji kako bi odabrali objekt s jednog položaja ili mjesta i postavili ga na drugo mjesto ili mjesto. U tu svrhu treba kontrolirati kutne pokrete zglobova robota, što se može postići pomoću servo motora. Ovi servo motori kontroliraju se pomoću PWM podataka koje daje robotski kontroler za pokretanje zglobova robota. Servo motori su sposobni stvoriti dovoljan zakretni moment za brzo pomicanje predmeta iz položaja zaustavljanja. Dakle, oni se koriste kao kotači u vojnim i industrijskim robotskim vozilima. Koračni motori također se mogu koristiti za upravljanje položajem, ali oni će trošiti snagu čak i u razdoblju odmora samo za zaključavanje i zadržavanje zapovijeđenog položaja. Dakle, servo motori se obično koriste u industrijskoj robotici kao zamjena za koračne motore visokih performansi.
S. Naresh Reddy
M.tech u ugrađenom sustavu
Vodič kroz projekt
Struktura mehaničkog robota mora se kontrolirati prema perfo  rm zadatak. Postoje tri različite faze upravljanja robotom, poput percepcije, obrade i djelovanja. Senzori daju informacije o položaju njegovih zglobova i krajnjeg efektora robotu, zatim se ti podaci obrađuju u upravljačku jedinicu i izračunavaju odgovarajući signal motoru koji se mehanički pomiče. Velika većina robota koristi električne motore. Višekratni istosmjerni motori bez četkica i četkica koriste se u prijenosnim robotima, a motori naizmjenične struje u industrijskim robotima. Ti se motori preferiraju u sustavima s manjim opterećenjima, a gdje je pretežni oblik gibanja rotacijski.
rm zadatak. Postoje tri različite faze upravljanja robotom, poput percepcije, obrade i djelovanja. Senzori daju informacije o položaju njegovih zglobova i krajnjeg efektora robotu, zatim se ti podaci obrađuju u upravljačku jedinicu i izračunavaju odgovarajući signal motoru koji se mehanički pomiče. Velika većina robota koristi električne motore. Višekratni istosmjerni motori bez četkica i četkica koriste se u prijenosnim robotima, a motori naizmjenične struje u industrijskim robotima. Ti se motori preferiraju u sustavima s manjim opterećenjima, a gdje je pretežni oblik gibanja rotacijski.
Suresh Megaji
M. Tech u bežičnim komunikacijskim sustavima
Writer tehničkog sadržaja

Ako se želite baviti 'robotikom' i njihovom primjenom na 'industriju', treba znati o 'motorima' koji se koriste u robotici jer robotika uglavnom ovisi o motorima. U osnovi se 'robotski strojevi' koriste za različite primjene u proizvodnji. Različiti ‘motori’ poput DC, impulsnih, koračnih, optičkih pogona, motora s djelomičnim zaokretom i efektom dvorane itd.… Koriste se s nekim tehnikama kako bi se primijenili u industriji i učinili prijateljskim, poput
- D.C motori se koriste za aplikacije orijentirane na baterije, sporije brzine i aplikacije za mobilnost.
- Gdje god nam treba aplikacija okrenuta rotaciji, možemo koristiti koračne motore poput unipolarnih i bipolarnih motora.
- Za pokrete glave i ruke možemo koristiti motore s djelomičnim okretajem.
- Ako želimo koristiti magnetska polja, možemo koristiti Hall Effect i motore optičkih pogona itd.
Korištenjem robotike koja koristi pametne motore možemo uštedjeti novac, vrijeme, prostor, opasna kretanja itd.
Ajay Sahare
Direktor marketinga

Industrijski roboti koriste se u industrijskom proizvodnom okruženju. To su krakovi posebno razvijeni za primjenu kao što su zavarivanje, rukovanje materijalom, bojanje i druge.
Ne može se svaki mehatronički uređaj koji se koristi u industrijskom okruženju smatrati robotom. Prema definiciji ISO-a (Međunarodne organizacije za standardizaciju), automatski kontrolirani, reprogramirani, višenamjenski manipulator koji se može programirati u tri ili više osi smatra se industrijskim robotom.
Motori koji se koriste u industriji robotike su
- Motori izmjenične struje (AC)
- Motori istosmjerne struje (istosmjerne struje)
- Servo motori
- Koračni motori.
1. AC motori mogu se dalje podijeliti na asinkrone i sinkrone tipove. Na primjer, indukcijski motor naizmjenične struje je asinhroni tip jedinice koji se u osnovi sastoji od žičanog namotanog statora i rotora. Na žicu je priključena snaga i izmjenična struja koja kroz nju inducira elektromagnetsko (EM) polje u namotanoj žici, s dovoljno jakim poljem koje pruža silu za kretanje rotora. Sinkroni motori su motori s konstantnom brzinom koji rade sinkronizirano s izmjeničnom frekvencijom izmjenične struje i obično se koriste tamo gdje je potrebna precizna konstantna brzina.
2. Mnoge industrijske aplikacije, uključujući robotiku, često koriste istosmjerne motore zbog jednostavnosti upravljanja brzinom i smjerom. Sposobni su za beskonačni raspon brzine, od pune brzine do nule, sa širokim rasponom opterećenja.
Budući da istosmjerni motori imaju visok omjer okretnog momenta i tromosti, mogu brzo reagirati na promjene u upravljačkim signalima. Istosmjernim motorom može se glatko upravljati do nule i trenutno ubrzati u suprotnom smjeru bez potrebe za složenim sklopkama za prebacivanje snage. Istosmjerni motori s četkicama s trajnim magnetima obično su skuplji od vrsta četkica, iako mogu pružiti prednosti u potrošnji energije i pouzdanosti.
Bez komutatora, motori bez četkica mogu raditi učinkovitije i pri većim brzinama od konvencionalnih istosmjernih motora. Većina istosmjernih motora bez četkica radi na trapezoidnom izmjeničnom valnom obliku, ali neki od njih rade sa sinusnim valovima. Motori bez četkica pogonjeni sinusnim valovima mogu postići nesmetan rad na nižim brzinama s valovitim valom, što ih čini idealnim za brušenje, premazivanje i druge primjene poput završne obrade površine.
U slučaju četkanih istosmjernih motora, ako želite da se vaš motor sporije okreće bez gubitka snage, možete koristiti modulaciju širine impulsa (PWM). To u osnovi znači vrlo brzo uključivanje i isključivanje motora. Na taj se način motor okreće manjom brzinom kao da će se primijeniti niži napon bez da se brine o snazi.
U osnovi je okretni moment koji generira četkani istosmjerni motor premalen, a brzina prevelika da bi bila korisna. Dakle, redukcije brzina obično se koriste za smanjenje brzine i povećanje okretnog momenta.
3. Servo motori se koriste u sustavima zatvorene petlje s digitalnim kontrolerom. Kontroler šalje naredbe brzine pogonskom pojačalu, koje pak napaja servo motor. Neki oblik uređaja za povratnu vezu, poput razrješivača ili kodera, pruža informacije o položaju i brzini servo motora. Razrješivač ili enkoder mogu biti integrirani s motorom ili smješteni na daljinu. Zbog zatvorene petlje, servo motor može raditi sa određenim profilom kretanja koji je programiran u regulatoru.
4. Koračni motori mogu raditi sa ili bez povratne sprege, s rotacijom motora podijeljenom u male kutne korake. Upravlja se impulsnim zapovjednim signalima i može se točno zaustaviti na zapovjednoj točki bez potrebe za kočnicama ili sklopovima kvačila. Kad se struja ukloni, koračni motor s trajnim magnetom uglavnom ostaje u posljednjem položaju. Više koračnih motora može se održavati u sinkronizaciji pokretanjem iz zajedničkog izvora.
Dev desai
Direktor marketinga 
Ako se planirate baviti robotikom, morat ćete se upoznati s mnogim dostupnim vrstama motora. Sva kretanja robotike motorizirana su na ovaj ili onaj način, pa je važno znati koja je vaša opcija.
Istosmjerni motori
Osim što se napaja baterijom, smjer kretanja istosmjernog motora određuje se polaritetom ulazne snage. To je apsolutna potreba za robotskim funkcijama. Srećom, ovaj tip motora dolazi u širokoj paleti veličina, zahtjeva za naponom i dostupan je svugdje.
Različite vrste motora su kao u nastavku
- Motor s osnovnom pokretljivošću
- Motor za hobije velike brzine
- Motor s remenskim pogonom
- Motor s automatskim automatima
- Puls operiran
- Motor prilagođen ruci
- Bipolarni stepenik s pokazivačem
Bio motor
Bio-metal je nevjerojatna tvar koja postoji već nekoliko godina i ima niz primjena na polju robotike. Na ilustraciji možemo vidjeti da će se komad bio-metalne žice smanjiti za pet posto duljine kad se preko njega primijeni samo nekoliko volti. Nakon godina ispitivanja, bio-žica se pokazala snažnom, pouzdanom i postaje sve korisnija kako se pojavljuju novi proizvodi. Njegovo nešto sporije vrijeme odziva čini ga idealnim za robotske primjene ruku i ruku, gdje bi trzanje bilo problematično. Dugi komad žice može stvoriti značajno kretanje kada se ispruži cijelom dužinom robotske ruke. Trenutno su na komercijalnom tržištu robotizirani kompleti za ruke koji koriste bio metal.
Releji
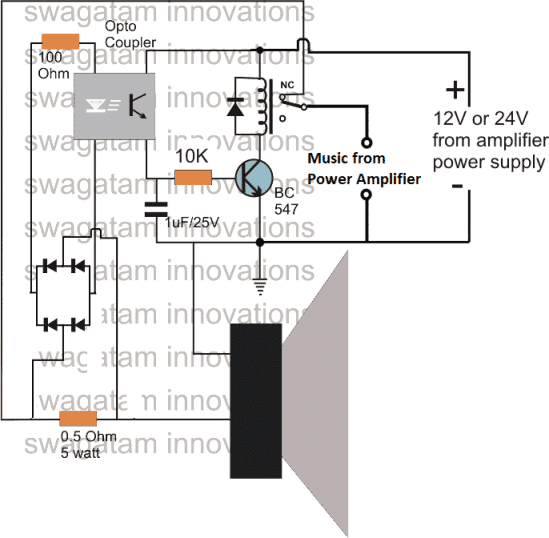
Relej se u robotici gotovo uvijek koristi za izoliranje snage namijenjene motorima od napajanja za rad računala. Motori zbog svoje niske impedancije postavljaju velike trenutne zahtjeve na napajanja i stvaraju višestruke kvarove koje računala ne mogu podnijeti. Stoga je dobra ideja koristiti zasebni izvor jake struje samo za motore.
Solenoidi
Solenoidi se najbolje koriste kao upravljački uređaji za manipulatore ili prekidači. Njihovo je kretanje brzo i snažno, pa se opruga gotovo uvijek koristi u hvatačima kako bi ublažila akciju. Kao što možete vidjeti na ilustraciji, upravljačke žice koriste se za zatvaranje hvatača. Te upravljačke žice mogu djelovati i kao povratne opruge. Ovakvi hvatači više se nalaze u radu na proizvodnoj liniji gdje je zadatak vrlo odmjeren i pokriva uske parametre.
Sekundarne funkcije
Većina motoričkih funkcija uključuje pokretljivost, ruku, glavu ili neko drugo vidljivo vanjsko kretanje, međutim, neki motorički pokreti nisu toliko vidljivi. Veliki industrijski roboti koriste hidrauličke sustave koji koriste motore pumpi za stvaranje radnog tlaka hidrauličke tekućine. Druga važna sekundarna funkcija motora je kontrolirano podešavanje. Da bi se poboljšala točnost, potenciometri koji su povezani s motorima obično su višeokretni uređaji.
Zaključak
Roboti mogu biti vrlo složeni uređaji koji zahtijevaju široku paletu pokreta pokretanih motorom. Ovaj je članak namijenjen pregledu opsega uređaja s kojima možda imate posla kao izrađivač robota. Bilo bi dobro započeti s istraživanjem dobavljača robotske opreme i dostupnih zaliha. Sada je dostupna ogromna količina proizvoda, a Internet olakšava pronalaženje, učenje i upotrebu. Bez obzira na vaše potrebe, malo domišljatosti i odlučnosti koju izgleda imaju svi graditelji robota trebali bi vam dobro poslužiti.
Samadan Wandre
Direktor marketinga
'Motori koji se koriste u robotici'
- Motor s osnovnom pokretljivošću

- Motor za hobije velike brzine
- Motor s remenskim pogonom
- Motor s automatskim automatima
- Puls operiran
- Motor prilagođen ruci
- Bipolarni stepenik s pokazivačem

Veći motori su najprikladniji za baze mobilnosti koje omogućuju roboti manevriranje terenom. Neki od ovih motora dolaze s prijenosnicima koji proizvode sporiju brzinu i obrtni moment potrebni za mobilnost. Spuštanje napona na motor također ga može usporiti na poželjniju brzinu. Samo eksperimentiranjem može se utvrditi hoće li vaš motor raditi s nižim naponom. Ako se dogodi, spasili ste si puno problema, ako ne, postoje i drugi načini usporavanja motora. Neki se brzi motori mogu koristiti ako se koriste pužni ili vijčani zupčanici.
Primjer vijčanog zupčanika može se vidjeti na ilustraciji robotske ruke. Kad se motor okrene u smjeru kazaljke na satu, vijak se povuče za motor i ruka se stegne, a kada se okrene u smjeru suprotnom od kazaljke na satu, ruka se proteže. Iako se osovina motora brzo okreće, djelovanje ruke je znatno sporije zbog smanjenja vijaka. Na ovoj sljedećoj ilustraciji kruga motora vidimo jednosmjerni motor koji kontrolira snažni tranzistor. Relejni prekidač (dvostruki pol dvostrukog bacanja) određuje smjer. Tranzistor Q1 trebao bi biti tranzistor snage za podnošenje velikog opterećenja motora.
Pulsni motori
Neki motori izvode smanjenje brzine radeći iz impulsnog istosmjernog signala. Taj je signal obično oko sto Hz. Brzina motora može se promijeniti promjenom širine impulsa, a ne promjenom frekvencije pulsa. Motori poput ovih mogu se naći u prodavaonicama viška elektronike i lako ih je prepoznati pomoću generatora impulsa spojenog na njega. Bilo koji istosmjerni motor može se upravljati impulsnim izvorom, a shema takvog sklopa je uključena.
Kao što vidite, 555 tajmer je odabran kao pogonski oscilator, koji proizvodi frekvenciju od približno 100 Hz. Otpornik R1 i kondenzator C stabiliziraju i izoliraju generator impulsa od šiljaka koje proizvodi motor. Budući da ovaj uređaj može napajati napajanje od 6 do 12 volti, možda ćete htjeti promijeniti vrijednost kondenzatora C4 i C6 za bolje rezultate, ovisno o tome koji napon koristite. Izlazni impuls uzima se s trećeg pina IC1 i dovodi se na dva pina IC2, također tajmera 555.
Drugi tajmer mijenja širinu impulsa podešavanjem napona koji se napaja na kondenzator C6 kroz potenciometar R5 i otpornik R6. Trajanje impulsa je ono što određuje brzinu motora, a širina impulsa može se prilagoditi od 10% do 100%.
Tranzistor Q1 prima signal moduliran širinom impulsa kroz otpornik R7. Budući da je Q1 uređaj slabe struje, on prosljeđuje signal na Q2, snažni tranzistor koji može podnijeti trenutne zahtjeve motora. Ovi tranzistori nisu kritični i gotovo će raditi bilo koja vrsta slabih tranzistora snage. Relej će odrediti u kojem će smjeru ići motor.
Koračni motori
Najsloženiji od svih motora je koračni motor. Kao i naziv, motor se okreće u stupnjevima i pokreće se impulsno. Točan stupanj skretanja po koraku može se razlikovati od proizvođača do modela, ali 20 je stupnjeva popularno i daje 18 koraka za jedan cjeloviti zavoj. Postoje dvije osnovne vrste koračnih motora, bipolarni i unipolarni. Kao što možete vidjeti na shemi koračnog motora, bipolarni je jednostavno motor s dvije zavojnice.
Unipolarni tip su dvije zavojnice s središnjim slavinama. Ako se zanemaruju središnje slavine, unipolarni motor može raditi kao bipolarni tip. Dvije zavojnice u koračnom motoru napajaju se naizmjenično u impulsima u polaritetu od zavojnice do zavojnice. U radnom dijagramu nalazi se karta ovog procesa koja grafički prikazuje motoričko djelovanje. Za razliku od konvencionalnih istosmjernih motora, okretni moment smanjuje se brzinom. Za pomicanje koračnog motora također je potrebna posebna vrsta pogonske jedinice koja bi se trebala isporučiti s motorom. Ne preporučuje se izrada upravljačke jedinice, osim ako je motor isporučen s dobrom specifikacijom koja sadrži preporuke za komponente i potpunu shemu.
Motor može zahtijevati odbojnike kako bi ga izolirao od pogonskog sustava ili može zahtijevati zasebno napajanje. Bez obzira na potrebe, oni se mogu znatno razlikovati od jednog motora do drugog. Hobi trgovine najpouzdaniji su dobavljači koračnih motora i premda ih višak elektroničkih trgovina povremeno može imati, možda neće sadržavati potrebne specifikacijske podatke
Motori s djelomičnim zaokretom
Neke robotske funkcije zahtijevaju samo djelomično okretanje, poput pokreta glave ili ruke. To ćete najlakše postići pomoću zaustavljača položaja i zupčanika. Ilustracija mehaničkih detalja ove vrste motora nalazi se gore. Mikroprekidači se mogu koristiti kao zaustavni senzori za isključivanje napajanja i resetiranje smjera za sljedeću akciju.
Donji kotač povezan je s motorom, dok je gornji kotač od donjeg kotača odvojen kružnim komadom filca. Kada se donji kotač okreće, gornji se kotač okreće s njim dok zaustavni klin ne dođe u kontakt s mikroprekidačem. Neki dizajni ne predviđaju zaustavljanje motora, pa će jednostavni vijci s odstojnicima funkcionirati kao zaustavljači motora.
Bio-motor
Bio-metal je nevjerojatna tvar koja postoji već nekoliko godina i ima niz primjena na polju robotike. Na ilustraciji možemo vidjeti da će se komad bio-metalne žice smanjiti za pet posto duljine kad se preko njega primijeni samo nekoliko volti. Nakon godina ispitivanja, bio-žica se pokazala snažnom, pouzdanom i postaje sve korisnija kako se pojavljuju novi proizvodi. Njegovo nešto sporije vrijeme odziva čini ga idealnim za robotske primjene ruku i ruku, gdje bi trzanje bilo problematično. Dugi komad žice može stvoriti značajno kretanje kada se ispruži cijelom dužinom robotske ruke. Trenutno su na komercijalnom tržištu robotizirani kompleti za ruke koji koriste bio metal.
Bhaskar Singh
Direktor marketinga
 Industrijski roboti su uređaji koji u određenoj mjeri dupliciraju ljudsko kretanje uz smanjenje opasnosti, pružajući više snage, točnosti i kontinuiteta. Potreban im je širok raspon pokreta pokretanih motorom, ovisno o načinu rada, upravljanju, korištenim alatima i radu koji treba izvesti. Industrijski robotski motor trebao bi imati potencijal da obavlja širok raspon dužnosti od uobičajenih motora kako bi se specijalizirao za određeni zadatak.
Industrijski roboti su uređaji koji u određenoj mjeri dupliciraju ljudsko kretanje uz smanjenje opasnosti, pružajući više snage, točnosti i kontinuiteta. Potreban im je širok raspon pokreta pokretanih motorom, ovisno o načinu rada, upravljanju, korištenim alatima i radu koji treba izvesti. Industrijski robotski motor trebao bi imati potencijal da obavlja širok raspon dužnosti od uobičajenih motora kako bi se specijalizirao za određeni zadatak.
Električni motori najčešće se koriste u industrijskoj robotici zbog visoko učinkovitih izvora energije i relativno jednostavnog dizajna što ih čini popularnijom opcijom u pogledu ocjene cijene i izvedbe u svim aspektima - instaliranju, održavanju i servisiranju.
Ovisno o potrebnom radu, različiti se motori koriste u različite svrhe. Primjerice, istosmjerni motori koriste se za kretanje u smjeru kazaljke na satu i u smjeru suprotnom od smjera kazaljke na satu, primjeri su u dizalicama i dizalicama, impulsni motori koriste se za pružanje impulsnih pokreta koristeći istosmjernu širinu impulsa, motori s djelomičnim okretajem koriste se za pokrete poput glave i ruke i najsloženiji - koračni motori koriste se za osiguravanje stepenastih okretaja u koracima od stupnja.
Štoviše, ovisno o vrsti posla, motori različitih nazivnih veličina i veličina koriste se u različite svrhe. Postoji nekoliko vrsta motora koji imaju različite primjene na različitim mjestima, ovisno o radu i dizajnu robota.
Mohan Krišna. L
Izvršni direktor prodaje i podrške
Roboti se koriste za obavljanje posla koji bi mogli raditi ljudi, a postoji mnogo razloga zašto su roboti bolji od ljudi. 
Postoje dvije glavne vrste robota: -
Mobilni robot: Taj pokret na nogama ili tragovima.
Stacionarni robot: To ima fiksnu bazu.
Stacionarni roboti obično se Robot Arms mogu koristiti za podizanje predmeta ili obavljanje nekog drugog posla koji uključuje dosezanje do predmeta.
Robotska ruka ima tri osnovna dijela: -
- Zglob ramena
- Zglob zgloba
- Fiksna baza
Treba ti robot za
- Sposobnost brzog rada i opasnog okoliša.
- Sposobnost ponavljanja zadataka iznova i iznova.
- Sposobnost preciznog rada.
- Sposobnost obavljanja različitih zadataka.
- Učinkovitost.
Motor je uređaj koji pretvara električnu energiju u mehaničku, tj. Elektro-mehanički uređaj. Postoje dvije vrste motora kao što su AC motor i DC motor
Motor koji se koristi u industriji robotike je servo motor. Servo motor je jednostavan električni motor kojim se upravlja pomoću servo mehanizma. Ako se njime upravlja preko AC, naziva se AC servo motor, inače DC servo motor. Većina servo motora može se okretati za oko 90 do 180 stupnjeva. Čak se i neki okreću kroz punih 360 stupnjeva ili više.Neke od primjena servo motora u Robotics-u su
- Primjena servo motora u robotskoj, tj. Jednostavnom robotu za odabir i postavljanje, koristi se za odabir predmeta s jednog položaja i postavljanje predmeta na drugi položaj.
- U transporterima se koriste servo motori
- u industrijskim proizvodnim i montažnim jedinicama za prosljeđivanje predmeta s jedne montažne stanice na drugu. Na primjer: - postupak punjenja boce.
- Servo motor u robotskom vozilu ovdje je servo motor koji se koristi u kotačima. Budući da se koristi servo motor s kontinuiranom rotacijom.
Dinesh.P
Direktor marketinga
 Uvesti robote kako bi se smanjili ljudski napori i pomoglo stvoriti sreću ljudima za budući razvoj. Izraz roboti znači stroj koji oponaša različite ljudske karakteristike. Robotika uključuje znanje iz mehanike, elektronike, elektrotehnike i računarstva. Motori koji se koriste u robotima su istosmjerni motori, koračni motori i servo motori
Uvesti robote kako bi se smanjili ljudski napori i pomoglo stvoriti sreću ljudima za budući razvoj. Izraz roboti znači stroj koji oponaša različite ljudske karakteristike. Robotika uključuje znanje iz mehanike, elektronike, elektrotehnike i računarstva. Motori koji se koriste u robotima su istosmjerni motori, koračni motori i servo motori
Gdje,
- Istosmjerni motori koriste se za kontinuiranu rotaciju
- Koračni motori koriste se za rotaciju na nekoliko stupnjeva
- Servo motori se koriste za pozicioniranje, mogu se koristiti u automobilima i avionima
Ganesh .J
Direktor marketinga 
Roboti se koriste za obavljanje posla koji bi mogli obaviti ljudi, a također smanjuju ljudski napor i vrijeme i poboljšavaju kvalitetu. Motori koji se koriste u industrijskoj robotici su
- Motori izmjenične struje (AC)
- Motori istosmjerne struje (istosmjerne struje)
- Servo motori
- Koračni motori.