
A servomotor djeluje kao rotacijski pokretač koji se uglavnom koristi za promjenu električnog ulaza u mehaničko ubrzanje. Ovaj motor radi na temelju servomehanizma gdje god se povratna informacija o položaju koristi za kontrolu brzine i konačnog položaja motora. Servo motori se okreću i dobivaju određeni kut na temelju primijenjenog ulaza. Servo motori su male veličine, ali su vrlo energetski učinkoviti. Ovi motori se klasificiraju u dvije vrste kao što su servomotori izmjenične struje i servomotori istosmjerne struje, ali glavna razlika između ova dva motora je izvor energije koji se koristi. Izvedba a DC servo motor uglavnom ovisi samo o naponu, dok AC servo motor ovisi i o naponu i frekvenciji. Ovaj članak govori o jednoj od vrsta servo motora - an AC servo motor – rad s aplikacijama.
Što je AC servo motor?
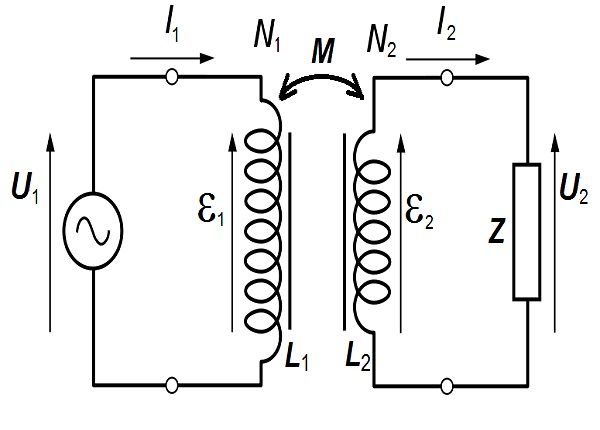
Tip servomotora koji generira mehanički učinak korištenjem izmjeničnog električnog ulaza u obliku precizne kutne brzine naziva se AC servo motor. Izlazna snaga dobivena iz ovog servomotora uglavnom se kreće od vata do nekoliko 100 vata. Radna frekvencija AC servo motora kreće se od 50 do 400 Hz. Dolje je prikazan dijagram AC servo motora.

Glavne značajke AC servo motora uglavnom uključuju; ovo su uređaji manje težine, koji osiguravaju stabilnost i pouzdanost unutar rada, ne stvara se buka tijekom rada, omogućuju linearne karakteristike zakretnog momenta i brzine i smanjuju troškove održavanja kada klizni prstenovi i četke nisu prisutni.
Pogledajte ovu vezu da biste saznali više o Tipovi AC servo motora
Konstrukcija AC servo motora
Općenito, AC servo motor je dvofazni indukcijski motor. Ovaj motor je konstruiran korištenjem statora i a rotor poput normalnog indukcijskog motora. Općenito, stator ovog servo motora ima laminiranu strukturu. Ovaj stator uključuje dva namota koji su postavljeni pod kutom od 90 stupnjeva u prostoru. Zbog ove varijacije faze stvara se rotacijsko magnetsko polje.

Prvi namot je poznat kao glavni namot ili također poznat kao fiksni fazni ili referentni namot. Ovdje se glavni namot aktivira iz izvora napajanja konstantnim naponom, dok se drugi namot, poput upravljačkog namota ili upravljačke faze, aktivira promjenjivim upravljačkim naponom. Ovaj upravljački napon jednostavno se dovodi iz servo pojačala.

Općenito, rotor je dostupan u dvije vrste kaveznog tipa i tipa čašice. Rotor koji se koristi u ovom motoru je normalni kavezni rotor uključujući aluminijske šipke učvršćene u utorima i kratko spojene kroz krajnje prstenove. Zračni raspor je minimalan za maksimalno povezivanje toka. Druga vrsta rotora kao što je kočnica za povlačenje uglavnom se koristi tamo gdje je inercija rotacijskog sustava niska. Dakle, ovo pomaže u smanjenju potrošnje energije.
Princip rada AC servomotora
Princip rada AC servo motora je; prvo, konstantan izmjenični napon se daje na glavnom namotaju pokretača servomotora, a drugi terminal statora je jednostavno spojen na upravljački transformator kroz upravljački namot. Zbog primijenjenog referentnog napona, osovina sinkronog generatora će se okretati određenom brzinom i dobiti određeni kutni položaj.

Osim toga, osovina upravljačkog transformatora ima određeni kutni položaj koji se uspoređuje s kutnom točkom osovine sinkrogeneratora. Tako će usporedba dviju kutnih pozicija dati signal pogreške. Točnije, procjenjuju se razine napona za ekvivalentne položaje osovine što proizvodi signal greške. Dakle, ovaj signal greške komunicira s trenutnom razinom napona na upravljačkom transformatoru. Nakon toga, ovaj signal se daje servo pojačalu tako da ono generira neravnomjeran upravljački napon.
Pomoću ovog primijenjenog napona, rotor ponovno postiže određenu brzinu, počinje se okretati i održava dok vrijednost signala pogreške ne dosegne nulu, čime se postiže željeni položaj motora unutar AC servomotora.
Prijenosna funkcija AC servo motora
Prijenosna funkcija AC servo motora može se definirati kao omjer L.T (Laplaceova transformacija) izlazne varijable prema L.T (Laplaceova transformacija) ulazne varijable. Dakle, matematički model izražava diferencijalnu jednadžbu koja govori o/p do i/p sustava.
Ako je T.F. (prijenosna funkcija) bilo kojeg sustava poznata, tada se izlazni odziv može izračunati za različite vrste ulaza kako bi se prepoznala priroda sustava. Slično, ako prijenosna funkcija (T.F) nije poznata, tada se može eksperimentalno pronaći jednostavnom primjenom poznatih ulaza na uređaj i proučavanjem izlaza sustava.
AC servo motor je dvofazni indukcijski motor što znači da ima dva namota poput kontrolnog namota (glavni namot polja) i referentnog namota (uzbudljivi namot).

Stoga moramo saznati prijenosnu funkciju servo motora izmjenične struje, tj. θ(s)/ec(s). Ovdje je 'θ(s)/' izlaz sustava dok je ex(s) ulaz sustava.
Kako bismo saznali prijenosnu funkciju motora, moramo saznati koliki je zakretni moment koji razvija motor 'Tm' i zakretni moment koji razvija opterećenje 'Tl'. Ako izjednačimo uvjet ravnoteže kao
Tm = Tl, tada možemo dobiti prijenosnu funkciju.
Neka je Tm = moment koji razvija motor.
Tl = moment koji razvija opterećenje ili moment opterećenja.
‘θ’ = kutni pomak.
'ω' = d θ/dt = kutna brzina.
'J' = moment tromosti tereta.
'B' je točka opterećenja.
Ovdje su dvije konstante koje treba uzeti u obzir K1 i K2.
'K1' je nagib napona upravljačke faze u odnosu na karakteristike momenta.
„K2” je nagib karakteristika momenta brzine.
Ovdje je moment koji razvija motor jednostavno označen sa
Tm = K1ec- K2 dθ/dt —–(1)
Moment opterećenja (TL) može se modelirati uzimajući u obzir jednadžbu ravnoteže momenta.
Primijenjeni moment = suprotni moment zbog J,B
Tl = TJ + TB = J d^2θ/dt^2 + B dθ/dt^2 + B —–(2)
Znamo da je uvjet ravnoteže Tm = Tl.
K1ec- K2 dθ/dt = J d^2θ/dt^2 + B dθ/dt^2 + B
Primijenite jednadžbu Laplaceove transformacije na gornju jednadžbu
K1Ec(s) – K2 S θ(S) = J S^2θ (S) + B S θ(S)
K1Ec(s) = JS^2θ (S) + BSθ(S)+ K2S θ(S)
K1Ec(s) = θ (S)[J S^2 + BS + K2S]
T.F = θ (S)Ec(s) = K1/ J S^2 + BS + K2S
= K1/ S [B + JS + K2]
= K1/ S [B + K2 + JS]
= K1/ S (B + K2) [1 + (J/ B + K2) *S]
T.F = θ (S)Ec(s) = K1/(B + K2) / S[1 + (J/ B + K2) *S]
T.F = Km / S[1 + (J/ B + K2) *S] => Km / S(1 + STm)] = θ (S)Ec(s)
T.F = Km / S(1 + STm)] = θ (S)Ec(s)
Gdje je Km = K1/ B + K2 = konstanta pojačanja motora.
Tm = J/ B + K2 = vremenska konstanta motora.
Metode kontrole brzine servo motora izmjenične struje
Općenito, servo motori imaju tri metode upravljanja kao što su kontrola položaja, kontrola momenta i kontrola brzine.
Metoda kontrole položaja koristi se za određivanje veličine brzine rotacije kroz vanjske ulazne frekvencijske signale. Kut zakreta određen je br. mahunarki. Položaj i brzina servo motora mogu se izravno dodijeliti putem komunikacije. Budući da položaj metode može imati izuzetno strogu kontrolu nad položajem i brzinom, tada se obično koristi unutar aplikacije za pozicioniranje.
U metodi upravljanja momentom, izlazni moment servo motora postavlja se analognim ulazom na adresi. Može promijeniti okretni moment jednostavnom promjenom analognog u stvarnom vremenu. Osim toga, također može promijeniti vrijednost na relativnoj adresi putem komunikacije.
U načinu upravljanja brzinom, brzinom motora se može upravljati analognim ulazom i impulsom. Ako postoje zahtjevi za preciznošću i nema brige oko tolikog okretnog momenta, onda je brzinski način rada bolji.
Karakteristike AC servo motora
Karakteristike brzine zakretnog momenta servo motora izmjenične struje prikazane su u nastavku. U sljedećim karakteristikama, moment se mijenja s brzinom, ali ne linearno jer uglavnom ovisi o omjeru reaktancije (X) prema otpornost (R). Niska vrijednost ovog omjera uključuje da motor ima veliki otpor i nisku reaktanciju, u takvim slučajevima, karakteristike motora su više linearne od visoke vrijednosti omjera za reaktanciju (X) i otpor (R).

Prednosti
Prednosti AC servo motora uključuju sljedeće.
- Karakteristike kontrole brzine ovog motora su dobre.
- Generiraju manju količinu topline.
- Nude visoku učinkovitost, veći okretni moment po težini, pouzdanost i smanjenu RF buku.
- Potrebno im je manje održavanja.
- Imaju duži životni vijek u nepostojanju komutatora.
- Ovi motori mogu podnijeti veće udare struje u industrijskim strojevima.
- Pri velikim brzinama nude konstantniji okretni moment.
- Ovi su vrlo pouzdani.
- Omogućuju performanse velike brzine.
- Oni su vrlo prikladni za aplikacije s nestabilnim opterećenjem.
Nedostaci AC servo motora uključuju sljedeće.
- Upravljanje AC servo motorom je teže.
- Ovi se motori mogu pokvariti stalnim preopterećenjem.
- Mjenjači su često potrebni za prijenos snage pri velikim brzinama.
Prijave
Primjene AC servo motora uključuju sljedeće.
- AC servo motori primjenjivi su tamo gdje je regulacija položaja značajna i obično se nalaze u poluvodičkim uređajima, robotima, zrakoplovima i alatnim strojevima.
- Ovi se motori koriste u instrumentima koji rade na servomehanizmu kao u računalima i uređajima za kontrolu položaja.
- AC servo motor se koristi u alatnim strojevima, robotskim strojevima i sustavima za praćenje.
- Ovi servo motori se koriste u raznim industrijama zbog svoje učinkovitosti i svestranosti.
- AC servo motor se koristi u većini uobičajenih strojeva i uređaja kao što su grijači vode, pećnice, pumpe, terenska vozila, oprema u vrtovima itd.
- Mnoge uređaje i alate koji se svakodnevno koriste u kući pokreću AC servo motori.
Dakle, ovo je pregled ak servo motori – rade s aplikacijama. Ovi se motori koriste u mnogim primjenama poput instrumenata koji rade na servomehanizmu, ali i alatnih strojeva, sustava za praćenje i robotike. Evo pitanja za vas, što je indukcijski motor?








![Diode s točkastim kontaktom [povijest, konstrukcija, primjena strujnog kruga]](https://electronics.jf-parede.pt/img/electronics-tutorial/38/point-contact-diodes-history-construction-application-circuit-1.jpg)