Razvojem tehnologija, posebno u robotskoj tehnologiji, roboti prevladavaju u mnogim aplikacijama. Neki od njih su vrlo rizičnog tipa i opasnih područja. Aplikacije za vojsku i na bojnim poljima sada sve više koriste robote u nekim ključnim i složenim zadacima. U jednom od svojih članaka opisao sam upotrebu robota kao špijuna u vojnim operacijama. Sad, što ako postoji potreba za obranom od robotsko vozilo ili napad robota? Tu dolazi potreba za robotom ugrađenim s mehanizmom napada. Jedan od takvih primjera je robotsko vozilo s LASER pištoljem.

RF kontrolirano robotsko vozilo s laserskim rasporedom zraka
Takav se robot u osnovi koristi u vojnim operacijama, a također i prometna policija za otkrivanje brzine kretanja vozila.
Prije nego što pređemo na detalje o robotima s laserskim pištoljima, hajde da brzo shvatimo LASER kao oružje.
LASERSKA (pojačava svjetlost stimulacijskom emisijom) zraka je jednosmjerno jako fokusirano svjetlo za razliku od one iz jednostavne žarulje. Sastoji se od sinkroniziranih korita i grebena, tj. Valovi se međusobno ne ometaju. To daje jako fokusirano svjetlo vrlo velike snage reda veličine 1000 do 1 milijun puta veće od tipičnog svjetla žarulje. To je uređaj koji kontrolira emisiju i apsorpciju fotona pumpajući dovoljne količine energije. U tome se izvor fotona pojačava u snop svjetlosti. Valna duljina ovih lasera mijenja se u različite spektre poput vidljivog, infracrvenog i ultraljubičastog.
Princip LASER-a vrti se oko tri stvari, a to su apsorpcija, spontana emisija i stimulirana emisija. Odgovarajuća količina energije iz fotona stupa u interakciju s atomom, što uzrokuje skok atoma iz nižeg u više energetsko stanje. Ovaj atom vraća se u niže energetsko stanje emitirajući foton koji se naziva spontana emisija. U stimuliranoj emisiji je oslobađanje energije iz atoma umjetnim putem. tako da foton djeluje s pobuđenim atomom, ima istu energiju i polarizaciju kao i incidentni foton.
Pogledajmo sada hardverske dijelove robota
- Baza: Osnova takvog robota može biti bilo koje kubično tijelo s kotačima pričvršćenima za njegovo kretanje.
- Istosmjerni motor: Robot se sastoji od dva istosmjerna motora koja pokreću pokretači motora i pruža potrebno kretanje robotu.
- Kontrolna jedinica: Kretanje robota kontrolira se pomoću RF komunikacijskog modula. Odašiljač se sastoji od tipki, mikrokontrolera, dekodera i RF odašiljača, dok se prijemnička jedinica ugrađena u robota sastoji od kodera i RF prijemničkog modula za kontrolu robotsko kretanje .
- LASER pištolj: LASER pištolj je postavljen na robota koji izvršava glavni zadatak robota.
Kratko zavirivanje u robote koji rade
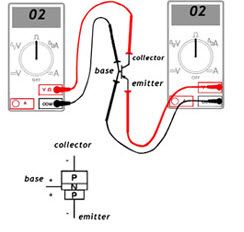
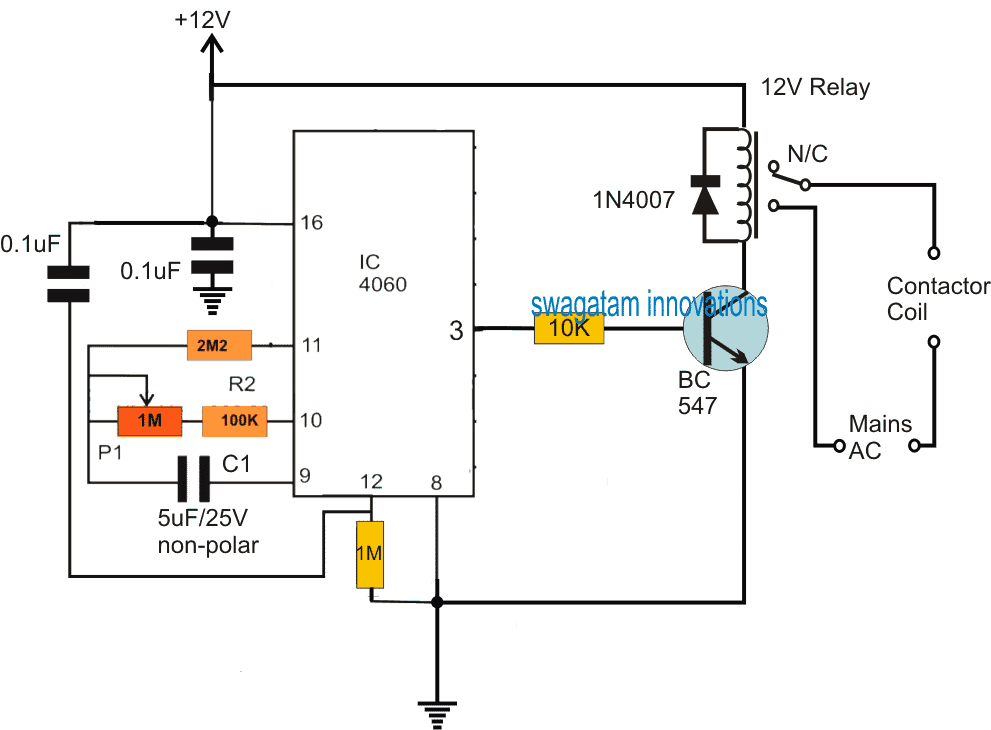
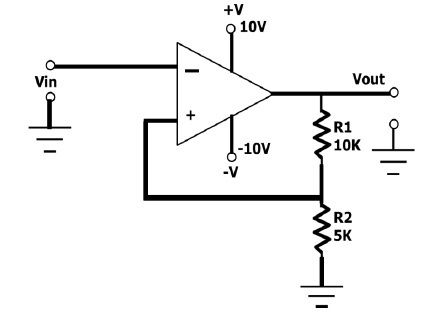
Robot dok se kreće u potrebnom smjeru puca iz snopa LASER-a snažnom svjetlosnom zrakom koja može ili naštetiti cilju ili samo stvoriti mjesto za otkrivanje cilja. LASER trebaju pokretati neki izvori energije. U jednostavnom prototipskom dizajnu koji koristi osnovnu LASER olovku, uređaj pokreće tranzistor koji djeluje kao prekidač. Tranzistor prima signal niske logike od mikrokontrolera i u isključenom je stanju, što čini LASER modul izravno povezanim s napajanjem od 5 V.

Laserska pištolj koju pokreće tranzistor radi kao pretvarač
Upravljanje robotom
Da bi se kontroliralo kretanje robota, treba kontrolirati rad motora. To se može postići pomoću RF upravljanog rada pokretača motora. Naredbe se prenose pomoću RF odašiljača na udaljenoj jedinici od oko 200 metara i prima ih RF prijemnik za pogon motora.
Jedinica odašiljača sastoji se od nekoliko tipki koje djeluju kao prekidači naredbi za pomicanje robota u bilo kojem željenom smjeru. Tipke su povezane s mikrokontrolerom, koji je programiran za slanje podataka u paralelnom obliku na temelju unosa s tipkom, na koder. Davač pretvara ove paralelne podatke u serijski oblik i ti se serijski podaci prenose pomoću antene modulom RF odašiljača.

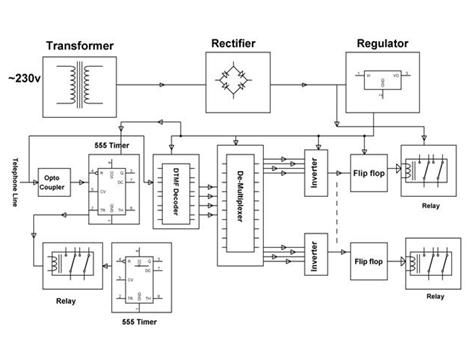
Blok dijagram koji prikazuje odjeljak odašiljača
Prijemna jedinica sastoji se od RF prijemnog modula koji prima modulirani signal i demodulira ga. Dekoder prima demodulirani signal u serijskom obliku i pretvara ga u paralelni oblik. Mikrokontroler prima signale i u skladu s tim upravlja upravljačkim programom motora. Pogonski sklop korišten u LM293D koji može istovremeno upravljati s 2 motora.

Blok dijagram koji prikazuje odjeljak prijemnika
Tako pomoću RF komunikacije možemo kontrolirati robota.
U gornjim opisima dao sam kratku ideju o jednostavnom prototipu robotskog vozila s LASER snopom. U stvarnim se programima obično koriste komunikacijski sustavi velikog dometa poput GSM ili DTMF za upravljanje robotom s udaljenih mjesta.
3 primjene robotskog vozila s laserskim pištoljem:
- Otkrivanje ciljeva : Robotsko vozilo može upotrijebiti LASER-snop kako bi stvorilo mjesto na cilju, tako da je lako vidljivo i da se može ciljati. Primjer je Air Borne LASER.
- Uništavanje cilja : Jaka Laserska zraka frekvencije od 95 GHz može izazvati gori u ljudskom tijelu dok prodire u kožu za 1/64thinča i energija snopa može zagrijati molekule vode u tijelu. Primjer je sustav aktivnog poricanja koji su razvili SAD.
- Pronalazač cilja i otkrivanje brzine : LASER snop robotskog vozila može se koristiti za pronalaženje dometa cilja po principu LASER refleksije svjetlosti, a također se može izračunati brzina cilja nakon što dobijemo domet.
Dakle, sada imamo kratku ideju o tome da su roboti koristili detektor i razarač ciljeva. Ima li koristi od normalne javnosti osim za vojsku? Razmislite i odgovorite.