
U današnje vrijeme robotika postaje jedno od najnaprednijih u području tehnologije. The primjene robotike uglavnom se bave automobilima, medicinom, građevinarstvom, obranom i također se koriste kao robot za gašenje požara za pomoć ljudima iz požarne nesreće. No, upravljanje robotom daljinskim upravljačem ili prekidačem prilično je složeno. Dakle, razvijen je novi projekt, odnosno robot za upravljanje gestama zasnovan na akcelerometru. Glavni cilj ovog projekta je kontrolirati kretanje robota pokretom ruke pomoću akcelerometra.

Robot za kontrolu gesta zasnovan na akcelerometru
Robot za kontrolu gesta zasnovan na akcelerometru
Ovaj projekt uključuje odjeljak odašiljača i prijemnika. The potrebne komponente za izgradnju ovog projekta su Ht12e, Ht12d, L293D, AT89S52, 7805, kondenzator, kristal, PBT konektor, jednopolna antena, otpornik, LED, akcelerometar i baterija. Akcelerometar je bitan uređaj u ovom projektu.
Akcelerometar ili odašiljač ovise o kretnji rukom. Preko odašiljačkog uređaja prima se naredba koja se obrađuje uz pomoć mikrokontrolera At89S51. Ovaj mikrokontroler daje signal robotu da se kreće u željenom smjeru. Osnovno načelo rada ovog robota je skup podatkovnih signala koji prenose očitanja uređaja na mikrokontroler ugrađen u robota. Unaprijed programirani mikrokontroler radi u skladu s programom, zbog čega robot radi u skladu s tim.
Robot kojim se kontrolira gesta pomoću akcelerometra jedna je vrsta robota kojom se može upravljati pokretom ruke postavljanjem akcelerometra na njega. Ovaj projekt podijeljen je u dva dijela odašiljač i prijemnik. Tamo gdje uređaj za kretanje radi kao odašiljač, a robot kao uređaj za prijam. Kad se na ruku stavi uređaj za odašiljanje (akcelerometar), on će robotu poslati signale za potrebnu operaciju.
Glavne komponente koje se koriste u odjeljku odašiljanja uključuju akcelerometar, komparator, HT12E IC koder i RF odašiljač .
Brzinomjer
Akcelerometar je jedan vrsta senzora i daje analogne podatke tijekom kretanja u smjeru X, Y i Z. Ti smjerovi ovise o vrsti senzora. Dijagram akcelerometra prikazan je u nastavku. Ovaj se senzor sastoji od smjerova strelica, ako senzor nagnemo u jednom smjeru, tada će se podaci na određenom pinu promijeniti u analognom obliku. Akcelerometar se sastoji od šest pinova, pri čemu funkcija svake iglice raspravlja se u nastavku.

Brzinomjer
- Pin-1: VDD pin koristi se za napajanje + 5V na ovaj pin
- Pin-2: GND zatik spojen je na tlo u svrhu pristranosti
- Pin-3: X pin prima podatke u X smjeru
- Pin-4: Y pin prima podatke u smjeru Y
- Pin-5: Z pin će primati podatke u Z smjeru
- Pin-6: ST pin služi za podešavanje osjetljivosti akcelerometra 1,5g ili 2g ili 3g ili 4g
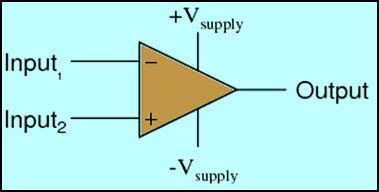
Usporednik
Usporednik se koristi za promjenu analognog napona u digitalni napon i uspoređuje taj analogni napon s referentnim naponom i daje precizno nizak ili visoki napon
Davač
Ovaj koder koristi se za kodiranje 4-bitnih podataka i prijenos pomoću modula RF odašiljača.
Modul RF odašiljača
RF TX modul radi na frekvenciji 433MHz i ovaj je modul lako dostupan na tržištu s niskom cijenom
Glavne komponente korištene u prijemnom odjeljku uključuju prijamnik, dekoder, mikrokontroler i pokretački program motora.

Odjeljak odašiljača
RF prijemnik
RF prijemnik ovog projekta primit će podatke koje prenosi uređaj za odašiljanje.
Dekoder
Dekoder se koristi za promjenu serijskih podataka u paralelne podatke koji se primaju od modula RF prijemnika.
Mikrokontroler
The mikrokontroler je najvažniji dio robota. Mikrokontroler obitelji 8051 koristi se u krugu za davanje kapaciteta za donošenje odluke
Vozač motora
Vozač motora je uređaj koji pokretu daje zadatak da izvrši zadatak poput motora. Dakle, zahtijevamo da ih vozač motora prođe kroz kontroler. Sučelje između motora i mikrokontrolera može se izvršiti pomoću IC upravljačkog sklopa L293D u ovom krugu.
U odjeljku prijamnika modul RF prijemnika prima podatke od odašiljača. Primljeni podaci mogu se dekodirati pomoću IC HT12D. Primljeni podaci mogu se obraditi mikrokontrolerom AT89S51, a upravljački program motora koristi se za upravljanje motorom.

Prijemnik
Robot za kontrolu gesta radi
Robot zasnovan na akcelerometru kreće se prema pokretu ruke dok postavljamo akcelerometar na vašu ruku. Kada nagnemo ruku akcelerometrom ispred robota, tada se robot kreće prema naprijed dok se ne dade sljedeći pokret. Kada nagnemo ruku u smjeru unatrag, tada robot mijenja smjer i stanje. Tada se počinje kretati unatrag dok se ne da sljedeći signal. Kada nagnemo ruku na lijevu stranu, tada se robot pomiče u lijevu stranu dok se ne da sljedeći signal. Na isti način, kada nagnemo ruku u desnu stranu, tada se robot pomakne s desne strane.
Prijave
The primjene akcelerometra robot koji se temelji na gestama uključuje
- Ti se roboti koriste u vojnim aplikacijama za upravljanje robotima
- Ti se roboti koriste u medicinske svrhe u svrhu kirurgije
- Ova se robotika koristi u građevinarstvu
- Ova se robotika koristi u industriji za kontrolu kolica i dizala.
Dakle, ovo je sve o robotu za upravljanje gestama koji se temelji na akcelerometru, njegovom radu i aplikacijama. Nadamo se da ste bolje razumjeli ovaj koncept. Nadalje, bilo kakve sumnje u vezi s ovim konceptom ili elektronički projekti , dajte svoje povratne informacije komentarom u odjeljku za komentare u nastavku. Evo pitanja za vas, koje su aplikacije robota za upravljanje gestama temeljenog na akcelerometru?
Foto bodovi:
- Robot za kontrolu gesta zasnovan na akcelerometru ytimg
- Brzinomjer static.flickr




{kind=link}
{kind=link}