Robot za odabir i postavljanje je onaj koji se koristi za podizanje predmeta i postavljanje na željeno mjesto. To može biti cilindrični robot koji pruža kretanje u vodoravnoj, okomitoj i rotacijskoj osi, sferni robot koji pruža dva rotacijska i jedan linearni pomak, zglobni robot ili robot scara (fiksni roboti s 3 rotacijske ruke s okomitim osima).
Prednosti
Prije nego što krenemo dalje, pogledajmo nekoliko razloga zašto se preferira odabir i postavljanje robota:
- Brži su i posao mogu obaviti za nekoliko sekundi u usporedbi s ljudskim kolegama.
- Oni su fleksibilni i imaju odgovarajući dizajn.
- Točni su.
- Povećavaju sigurnost radnog okruženja i zapravo se nikada ne umaraju.
Dijelovi robota Pick N Place

Odaberite robota N Place
Pogledajmo od čega se zapravo sastoji robot za odabir i postavljanje:
- Roveru : To je glavno tijelo robota koje se sastoji od nekoliko krutih tijela poput cilindra ili kugle, zglobova i karika. Poznat je i kao manipulator.
- Krajnji efektor : To je tijelo povezano s posljednjim zglobom rovera koje se koristi u svrhu hvatanja ili rukovanja predmetima. To može biti analogija s rukom ljudskog bića.
- Pokretači : Oni su pokretači robota. Zapravo pokreće robota. To može biti bilo koji motor poput servo motora, koračnog motora ili pneumatskih ili hidrauličnih cilindara.
- Senzori: Koriste se za otkrivanje unutarnjeg kao i vanjskog stanja kako bi se osiguralo da robot nesmetano funkcionira u cjelini. Senzori uključuju senzore dodira, IR senzor itd.
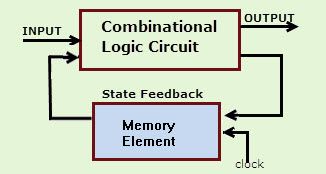
- Kontroler : Koristi se za upravljanje aktuatorima na temelju povratne sprege senzora i na taj način kontrolira kretanje svakog zgloba i na kraju kretanje krajnjeg efektora.
Rad robota Basic Pick N Place:
Osnovna funkcija a odabrati i smjestiti robota vrši se njenim zglobovima. Zglobovi su analogni ljudskim zglobovima i koriste se za spajanje dva uzastopna kruta tijela u robotu. Mogu biti rotacijski ili linearni. Da bismo dodali zglob bilo kojoj kariki robota, moramo znati o stupnjevima slobode i stupnjevima kretanja za taj dio tijela. Stupnjevi slobode provode linearno i rotacijsko kretanje tijela, a stupnjevi gibanja podrazumijevaju broj osi koje tijelo može pomicati.

Jednostavni robot Pick N Place
Jednostavan robot za odabir i postavljanje sastoji se od dva kruta tijela na pokretnoj osnovi, spojena zajedno s okretnim zglobom. Rotacijski zglob je onaj koji omogućuje rotaciju u 360 stupnjeva oko bilo koje od osi.
- Dno ili postolje pričvršćeni su kotačima koji omogućuju linearno kretanje.
- 1svkruto tijelo je učvršćeno i podupire drugo kruto tijelo kojem je predviđen krajnji efektor.
- 2ndkruto tijelo osigurano je kretanjem u sve 3 osi i ima 3 stupnja slobode. Spojen je na 1svtijelo s rotacijskim zglobom.
- Krajnji efektor trebao bi smjestiti svih 6 stupnjeva slobode, kako bi dosegao sve strane komponente, kako bi zauzeo položaj na bilo kojoj visini.
U cjelini, osnovni robot za odabir i mjesto funkcionira na sljedeći način:
- Kotači ispod podnožja pomažu u premještanju robota na željeno mjesto.
- Čvrsto tijelo koje podupire krajnji efektor savija se ili uspravlja da bi došlo do položaja na kojem se nalazi predmet.
- Krajnji efektor snažno hvata predmet i postavlja ga na željeni položaj.
Sad kad smo dobili kratku ideju o robotu za odabir i postavljanje, osnovno je pitanje kako se njime zapravo upravlja.
Jednostavnim robotom za odabir i postavljanje može se upravljati kontroliranjem kretanja njegovog krajnjeg efektora. Kretanje se može koristiti hidrauličkim kretanjem, tj. Korištenjem hidraulične tekućine pod pritiskom za pogon robota ili pneumatskim kretanjem, tj. Korištenjem zraka pod tlakom da bi se izazvalo mehaničko gibanje. Međutim, najučinkovitiji način je upotreba motora za pružanje potrebnog kretanja. Motori se moraju kontrolirati kako bi se robotu i krajnjem efektoru omogućilo potrebno kretanje.
Radni primjer upravljanja robotom Pick N Place
Što kažete na upravljanje robotom pomoću samo nekoliko gumba na tipkovnici? Da, moguće je! Samo pritiskom na potrebnu tipku možemo poslati naredbu robotu da se kreće u bilo kojem smjeru kako bi postigao naš zadatak. Štoviše, to se može postići jednostavnom bežičnom komunikacijom.
Pogledajmo kako ovo zapravo funkcionira:
Dio odašiljača sastoji se od tipkovnice spojene s mikrokontrolerom. Bilo koji broj gumba u decimalnom formatu mikrokontroler pretvara u binarni četveroznamenkasti zapis, a paralelni izlaz na jednom od njegovih priključaka primjenjuje se na koder. Davač pretvara ove paralelne podatke u serijske podatke i oni se dostavljaju na odašiljač, opremljen antenom za prijenos serijskih podataka.

Blok dijagram koji prikazuje odašiljač robota Pick N Place
Prijemna strana sastoji se od dekodera spojenog s mikrokontrolerom. Dekoder pretvara primljenu naredbu u serijskom formatu u paralelni oblik i daje te podatke mikrokontroleru. Na temelju ove naredbe mikrokontroler šalje odgovarajuće ulazne signale pokretačima motora za pogon pojedinih motora.

Blok dijagram koji prikazuje prijemnik robota Pick N Place
Sustav se sastoji od dva motora za pokretanje cijelog robota i dva druga motora za pokretanje ruke. Krajnjim efektorom ili hvataljkom treba kontrolirati kako bi se na predmet vršio odgovarajući pritisak kako bi se njime učinkovito rukovalo, da bi se dobio meko držanje . To se osigurava upravljanjem motorom ruku pomoću odgovarajuće naredbe. Izlaz iz ručnih motora povezan je na otpornik od 10Ohms / 2W i u trenutku preopterećenja ili zaključanog stanja motora razvija se visoki napon na otporniku, što uzrokuje logičku visoku razinu na izlazu optičkog izolatora i prekida pin mikrokontrolera spojen na izlaz optoizolatora kroz pnp tranzistor dobiva logički nizak signal, što zaustavlja sve ostale radnje hvataljke.
Tako jednostavnom RF komunikacijom zapravo možemo kontrolirati robota za odabir i postavljanje.
Praktične primjene robota za odabir i mjesto:
- Obrambene aplikacije : Može se koristiti za nadzor, a također i za prikupljanje štetnih predmeta poput bombi i njihovo sigurno širenje.
- Industrijske primjene : Ovi se roboti koriste u proizvodnji kako bi pokupili potrebne dijelove i postavili ih u ispravan položaj kako bi dovršili učvršćenje stroja. Također se može koristiti za postavljanje predmeta na transportnu traku, kao i za preuzimanje neispravnih proizvoda s transportne trake.
- Medicinske primjene : Ovi se roboti mogu koristiti u raznim kirurškim operacijama, poput operacija zamjene zglobova, ortopedskih i internih operacija. Izvodi operacije s više preciznosti i točnosti.
Osim ovih aplikacija, ti se roboti mogu koristiti i u raznim drugim aplikacijama pogodnim za čovječanstvo.
Sada ostaje pitanje - Koliko je dalek dan kada će roboti ljudima potpuno olakšati put?