U ovom dijelu članka saznajemo o inovativnoj metodi pretvaranja mehanizma za pritiskanje pedala u električnim vozilima u odgovarajući električni signal koji se može dalje koristiti za obradu regulacije brzine vozila.
Objašnjeni koncept djelovat će poput elektroničkog papučice gasa, koji će linearno povećavati brzinu vozila kad se postupno pritisne papučica, i obrnuto, koristeći PWM tehnologiju
Ideju je zatražio Mr.Lokesh Maini
Tehničke specifikacije
Ja sam mehaničar, trenutno radim na električnom vozilu i želim kontrolirati brzinu motora pomoću pedale. Ne dobivam kontroler za svoj motor, molim vas, pomozite mi da napravim vlastiti, bit ću vrlo dobar
zahvalan
Specifikacije motora su 36volt, 43amp i 1,5hp četkani istosmjerni motor.
Mehanički dizajn
Elektronička verzija papučice gasa prvenstveno će trebati mehanizam za prvo pretvaranje mehaničkog pritiskanja papučice u odgovarajući električni signal, tako da se taj signal može obraditi kroz fazu procesora signala za željenu pretvorbu u praktičnu kontrolu brzine vozilo.
Mnogo se koncepata može isprobati, na primjer upotrebom piezo senzora opterećenja, kapacitivnog senzora opterećenja, rezonancijskim senzorom itd. U ovom ćemo članku naučiti mnogo jednostavniju metodu koju sam smislio i koja uključuje LED / LDR sklop za postizanje istog .

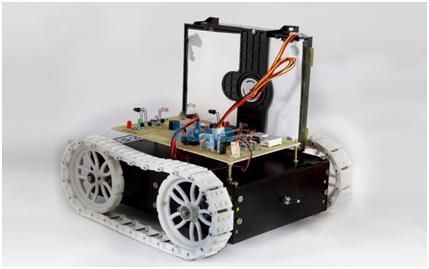
U elektromehaničkom rasporedu prikazanom na gornjoj slici možemo vidjeti sljedeće integrirane komponente:
Mali zupčanik pričvršćen vijčanim mehanizmom.
Glava vijka koja ima bijelu mat površinu reflektora
Sklop LED / LDR postavljen ispred glave vijka.
Kako funkcionira Predloženi mehanizam.
Zupčanik prikazan na gornjoj slici treba zaključati drugim stupnjem prijenosa koji ima omjer koji može biti 10 puta veći od ovog stupnja prijenosa.
Veći zupčanik mora biti konfiguriran s mehanizmom pedale tako da pokreće rotacijsko kretanje kao odgovor na pritiskanje papučice.
Rotacijski odziv zupčanika zauzvrat će proizvesti pomicanje glave vijka prema komori u kojoj se nalazi sklop LED / LDR.
Proces će uzrokovati da LDR primi proporcionalno različitu količinu reflektirane svjetlosti od LED-a.
Ovi podaci koji se razlikuju (u obliku promjenjivog otpora) koji odgovaraju pritisku papučice mogu se zatim poslati u krug procesora signala za provođenje namjeravane kontrole brzine određenog vozila.
U sljedeći post naučit ćemo stupanj procesora signala pomoću PWM tehnike.
U gornji odjeljak naučili smo o jednostavnom sklopu elektromehaničkog pretvarača za transformiranje djelovanja papučice u proporcionalno promjenjivi električni signal.
Pretvaranje radnje pedale u PWM
Sada proučimo izvedbu sklopa koja će nam omogućiti pretvaranje električnog signala papučice u odgovarajuće varirajući PWM signal za predviđenu kontrolu brzine motora vozila.

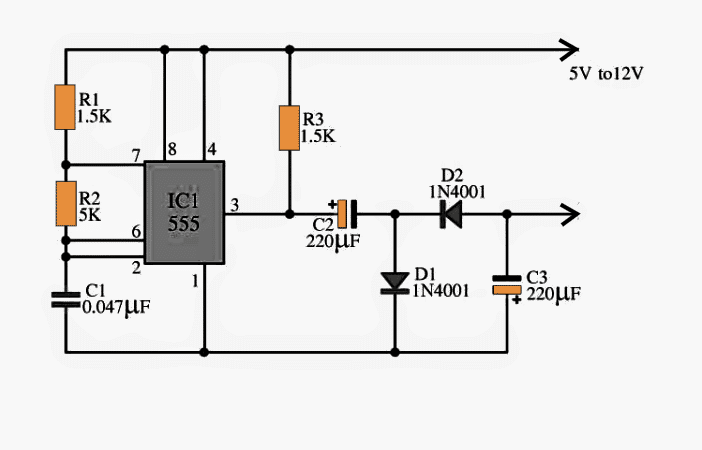
Pozivajući se na gornji dijagram sklopa, rad kruga možemo procijeniti uz pomoć sljedećih točaka:
IC1 je konfiguriran kao generator impulsa od 80Hz koji ima radno vrijeme maksimalno vrijeme uključivanja i minimalno vrijeme isključivanja
IC2 je namješten kao usporednik koji prvo pretvara gornji impuls od 80Hz primijenjen na njegovom pin2 s valovima trokuta generiranim na njegovom pin6 i uspoređuje valove trokuta s modulacijskim naponom koji je dostupan na njegovom pin5.
Modulacijski napon pin5 izveden je iz emitera BJT BC547 koji je konfiguriran kao zajednički kolektor s bazom povezanom s LDR ulazima postignutim djelovanjem papučice.
Različiti otpori kao odgovor na pritiskanje papučice uspoređuju se s unaprijed postavljenom postavkom od 100 K i na dnu tranzistora razvija se proporcionalna veličina napona koja pretvara ulaz slabe struje u ekvivalentni signal velike struje preko pin5 IC2.
Ovu trenutnu razinu potencijala prihvaća i obrađuje IC2 generirajući proporcionalnu veličinu PWM signala za MOSFET i priključeni motor.
Tako se brzina motora kontrolira i mijenja prema fluktuirajućim PWM-ima kao odgovor na pritiske papučica u vozilu.
Gore navedeni postupci učinkovito pretvaraju radnje papučice u kontrolirani rad motora vozila i njegovu brzinu.
Kako postaviti krug.
Jako je lako.
- Pritisnite papučicu do svoje maksimalne točke tako da glava vijka dosegne u najbliži mogući položaj ispred sklopa LED / LDR.
- Zatim prilagodite unaprijed postavljenu vrijednost 100 k dok pin3 IC2 ne počne generirati PWM-ove s najvećom širinom, to se može potvrditi mjerenjem napona na pin3 da bude što bliži opskrbnom naponu kruga, odnosno 5V.
- Nakon što se to učini, moglo bi se pretpostaviti da je postupak postavljanja dovršen.
- Rezultati se sada mogu provjeriti pritiskom na papučicu na različitim razinama i provjerom da se brzina motora razlikuje na identičan način.
Prethodno: Jednostavni ESR mjerni krug Dalje: Kako izraditi krug za rastuću svjetlost