Elektromehanički uređaj ili stroj koji se koristi u razne svrhe i njime se upravlja i njime se upravlja pomoću programskih tehnika naziva se robot. Roboti su različitih vrsta na temelju njihove primjene kao što su industrijski roboti , vojni roboti, svemirski roboti, domaći roboti, roboti koji hodaju, roboti penjači i tako dalje. Najnapredniji projekti robotike razvijaju se za učinkovitu upotrebu u raznim poljima za nekoliko aplikacija. U ovom ćemo članku razgovarati o posebnoj vrsti projekata robotike, odnosno robotskom vozilu koje prati liniju s mehanizmom za hodanje i penjanje.
Robotsko vozilo

Projekti robotike za studente inženjerstva
The robotska vozila su posebne vrste strojeva dizajniranih za samostalno kretanje po tlu, zraku, pod vodom i u svemiru bez čovjeka na brodu. Ovim robotskim vozilima upravlja i njima upravlja razni senzori temeljeni sustavi upravljanja. Robotska vozila posebno su dizajnirana za uporabu u uvjetima u kojima ljudska bića ne mogu ući, poput požara, vrlo visokih ili vrlo niskih temperatura, itd.,.
Robot sljedbenik crte

Robot sljedbenik crte
Robotsko vozilo koje se kreće slijedeći određeni put ili liniju možemo nazvati a robot sljedbenik crte . Ovi roboti za praćenje linija posebno se koriste u industrijskim primjenama za posebne svrhe, poput prijevoza različitih dijelova ili strojeva ili vozila (automobili, bicikli itd.), Prateći određenu liniju od jedne točke (proizvodne jedinice) do druge točke (sklopna jedinica) .
Uobičajena linija koja slijedi robotsko vozilo s posebnim značajkama poput mehanizma za hodanje i penjanje jedna je od zanimljivi projekti robotike za studente inženjerstva , koji se može koristiti za nekoliko aplikacija. Jednostavni koraci za dizajn robota sljedbenika linija s mehanizmom za hodanje i penjanje prikazani su u nastavku.
Korak 1: Prikupljanje potrebnih komponenata

Električne i elektroničke komponente
Komponente potrebne za konstrukcijsku liniju koja slijedi robotsko vozilo s mehanizmom za hodanje i penjanje trebaju se procijeniti na temelju primjene robota. Okupite sve električne i elektroničke komponente kao što su otpornici, kondenzatori, IC odašiljači, istosmjerni motori, tranzistori, tijelo robota i fotodiode s odgovarajućim ocjenama, zajedno s ostalim dijelovima kao što su karton, vijci, matice, aluminijske trake itd., Prema zahtjevu.
Korak 2: Analiza kruga za robota sljedbenika linija

Linija nakon robotiziranog vozila proširiva na blok-dijagram robota za hodanje i penjanje
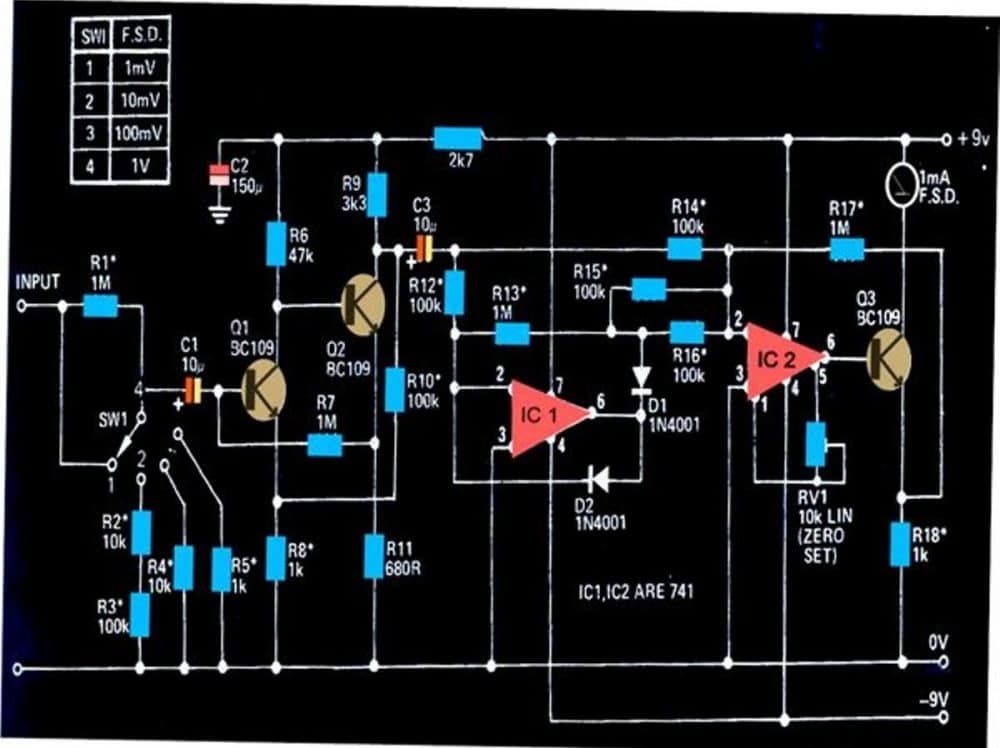
Prvenstveno osmislite blok dijagram projektnih krugova s raznim blokovima kao što su blok napajanja , IR LED i fotodiodni blok i tako dalje. Nakon skupljanja komponenata, analizirajte dizajn sklopa na temelju rada različitih korištenih komponenata. Zatim stavite komponente preko ploče za lemljenje prema shemi kruga pomoću spojnih žica za ispitivanje rada kruga prije nego što sklop sklopa napravite na PCB. Testiranjem kruga preko ploče za lemljenje ako su potrebne bilo kakve promjene u krugu ili nazivima komponenata, tada se izmjene mogu izvršiti bez gubljenja novca i vremena za zamjenu komponenata ili promjenu dizajna sklopa.
Korak 3: Sastavljanje i lemljenje komponenata

Linija nakon robotskog vozila proširiva na projekt robota za pješačenje i penjanje
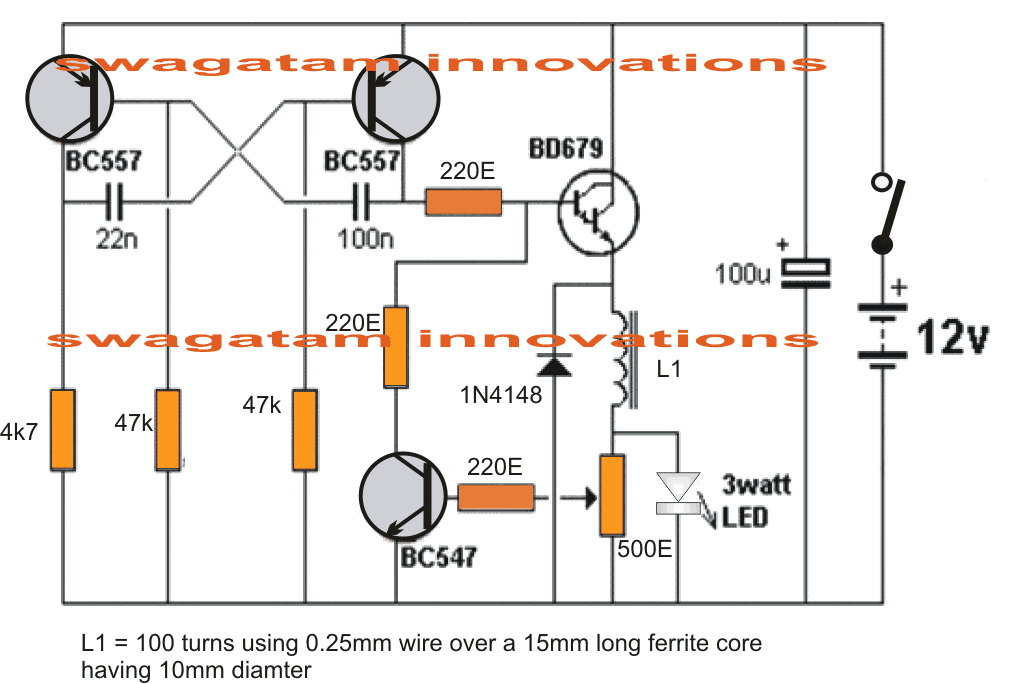
Stoga, nakon analize dizajna sklopa, sastavite komponente prema shemi sklopa preko PCB-a. Zatim spojite krug pomoću lemilice i žice za lemljenje slijedeći odgovarajuće smjernice za lemljenje. Spojite sve dijelove robota pravilno kako biste oblikovali robota koji prati liniju, kao što je prikazano na gornjoj slici, i po potrebi zalijepite dijelove robotskog vozila.
Korak 4: Rad linijskog sljedbenika
IR odašiljač i fotodioda koriste se kao fotosenzor par koji se može koristiti za otkrivanje određene staze za kretanje robota sljedbenika crte tijekom hodanja i penjanja po zidovima. Par fotosenzora daje odgovarajuće signale za prebacivanje tranzistora za pogon motora robota sljedbenika linija.
Korak 5: Robotsko vozilo sljedbene linije s mehanizmom za hodanje i penjanje
Brojni su projekti robotike za studente inženjerstva u kojoj je sljedbeno robotsko vozilo s mehanizmom za hodanje i penjanje inovativan i zanimljiv projekt koji možete sami dizajnirati pomoću naše besplatne e-knjige za dizajn elektroničkih projekata.
The primjena robotike brzo se povećava u našem svakodnevnom životu za nekoliko funkcija poput industrijske primjene, premještanja ili dizanja teških proizvoda, transporta unutar ograničenog područja slijedeći određeni put, obrade, zavarivanja, kućanskih aparata, autonomnih robota, vojnih robota za smanjenje ljudskih sudjelovanje i opasnost, suradnički roboti za interakciju s čovjekom, kao i za izvršavanje nekoliko zadataka, obrazovni roboti, mobilni roboti i humanoidi.
Zanima li vas dizajn elektronički projekti na svoju ruku? Znate li kako razviti humanoidne robote? Ako želite znati više o projektima robotike za studente tehničkih znanosti, možete uputiti svoje upite, komentare, ideje i prijedloge u odjeljak za komentare u nastavku za bilo kakvu tehničku pomoć.