U ovom postu istražujemo tehničke specifikacije i detalje pinouta IC L293, koji je svestrani četverostruki IC-pokretački modul s pola H, a može se koristiti za implementaciju mnogih zanimljivih motora sklop zasnovan na vozaču primjene, kao što su pogonski motori, solenoidi i druga induktivna opterećenja (4 jedinice odvojeno ili u parovima kroz push-pull način rada).
Kako radi
IC L293 u osnovi uključuje dva para izlaza koji se mogu samostalno koristiti za upravljanje dvama odvojenim opterećenjima u push push modu ili u dvosmjernom načinu, koji se naziva i načinom totem pol. Alternativno, ovih par para izlaza mogu biti pojedinačno koristi se za jednosmjerno rukovanje 4 pojedinačna opterećenja.
Gore navedeni postupci opterećenja kontroliraju se pomoću odgovarajućih ulaznih pinouta, aktiviranih iz kruga vanjskog oscilatora ili a PWM izvor .
Na primjer, ako je potrebno da teretom upravlja totemski stup, odgovarajući ulazi dvaju stupnjeva pogona IC-a mogu se aktivirati s vanjskog oscilator poput nekoliko NAND vrata , pri čemu bi se jedan ulaz mogao ožičiti kao oscilator, a drugi kao pretvarač.
Dva antifazna signala od njih NAND vrata tada bi se mogao povezati s ulazima L293 za upravljanje relevantnim izlazima na način totem-stupa (push-pull), što bi zauzvrat pokrenulo povezano opterećenje na isti način.
Dodjela pinouta IC L293
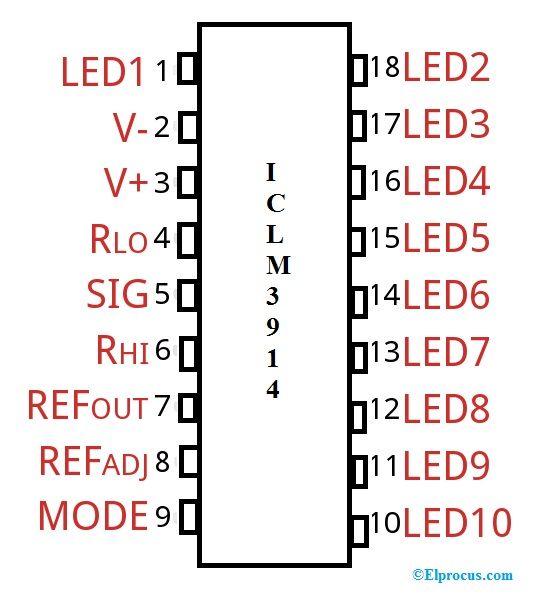
Sada naučimo funkcije izvlačenja IC L293 pozivajući se na sljedeći dijagram i iz sljedećeg objašnjenja:

Pin # 2 je upravljački ulaz, koji kontrolira izlazni pin # 3.
Slično tome, pin # 7 je upravljački ulaz za izlazni pin # 6.
Pin # 1 koristi se za omogućavanje ili onemogućavanje gore navedenih skupova pinouta. Pozitivno na pin # 1 drži gornje skupove pinouta omogućenima i aktivnima, dok ih negativno ili 0V napajanje trenutno onemogućava.
Potpuno identično, Pin # 15 i pin # 10 postaju upravljački ulazi za odgovarajuće izlaze pin # 14 i pin # 11, a oni ostaju u funkciji sve dok je pin # 9 u pozitivnoj logici i onemogućen kada je 0V logika primijenjen na ovom pinoutu.
Kao što je prethodno objašnjeno, pin # 3 i pin 6 mogu se koristiti kao parovi totem pola, napajajući antifazni logički signal na njihov ulazni pin 7 i pin 2. Znači, kada se pin # 2 napaja pozitivnom logikom, pin # 7 mora imati negativnu logiku i obrnuto.
To će omogućiti da izlazi pin 6 i pin 3 upravljaju povezanim opterećenjem u odgovarajućem smjeru, a obrnuto, kada se ulazni logički signali preokrenu, polaritet opterećenja se također obrne i počet će se okretati u suprotnom smjeru.
Ako se ovaj redoslijed brzo prebaci, tada teret djeluje na odgovarajući način amo-tamo ili na push pull.
Gore navedena operacija može se preslikati i na drugi bočni par upravljačkih programa.
Vcc ili pozitivni ulazi napajanja za IC konfigurirani su neovisno za dva različita ulaza napajanja.
Pin # 16, (Vcc1) koristi se za rad pinouts-a za omogućavanje i za rad drugih internih logičkih stupnjeva IC-a, a ovaj bi se mogao isporučiti s ulazom od 5V, iako je maksimalno ograničenje 36V
Pin # 8, (Vcc2) posebno se koristi za napajanje motora, a na njega se može napajati bilo što od 4,5 V do 36 V
Električna specifikacija IC L293
IC L293 dizajniran je za rad s bilo kojim napajanjem između 4,5 V i 36 V, s maksimalnom specifikacijom za rukovanje strujom ne većom od 1 ampera (2 Amp u impulsnom načinu rada, maksimalno 5 ms)
Stoga se bilo kojim opterećenjem unutar gore spomenutih specifikacija može upravljati na razmatranim izlazima IC L293.
Logika ulaznog upravljanja ne smije se prekoračiti iznad 7V, bilo kao kontinuirano napajanje ili PWM napajanje.
Korištenje L293 IC za primjenu upravljanja motorom
Sada naučimo kako implementirati sklopove upravljačkog sklopa motora pomoću IC L293 kroz različite načine rada i pomoću čak 4 motora s odvojenim upravljačkim uređajem.
U našem prethodnom postu proučavali smo detalje pinouta i funkcioniranja IC L293, ovdje saznajemo kako se isti IC može koristiti za upravljanje motorima kroz određene načine i konfiguracije.
Načini upravljanja
IC L293 može se koristiti za upravljanje motorima u sljedećim načinima:
1) 4 motora kroz neovisne PWM ulaze.
“kako ic radi ”
2) 2 motora u dvosmjernom modu ili načinu rada totem-stupa s regulacijom brzine putem PWM-a
3) Jedan dvofazni BLDC motor koji koristi PWM ulaz
Slika ispod pokazuje kako se IC može koristiti za upravljanje motorima s neovisnim upravljačima, a također i kako se jedan motor može koristiti za postizanje dvosmjerna kontrola :

Lijeva strana IC prikazuje motor koji je konfiguriran za rad u dvosmjernom načinu rada. Kako bi se osiguralo da se motor okreće u jednom od odabranih smjerova, pin # 1 i pin # 7 moraju se primijeniti s protufaznim 5V istosmjernim ulazom. Da bi se promijenio smjer vrtnje motora, ovaj polaritet od 5 V mogao bi se promijeniti na spomenutim ulaznim pinovima.
Pin # 1 mora se držati na visokoj logici kako bi motor i IC funkcioniranje bili omogućeni, logika 0 ovdje će trenutno zaustaviti motor.
Opskrba na upravljačkim ulaznim pinoutima može biti u obliku PWM-a, za što se može dodatno koristiti upravljanje brzinom motora od 0 do maksimuma, jednostavno mijenjajući radni ciklus PWM.
Desna strana IC prikazuje raspored u kojem se nekoliko motora upravlja neovisno putem neovisnih PWM ulaza na odgovarajućem pinu # 15 i pinu # 10.
Pin # 9 mora se držati na visokoj logici kako bi motor i IC ostali u funkciji. Logička nula na ovom pinoutu trenutno će zaustaviti i onemogućiti funkciju priključenih motora.
Budući da su lijevi i desni bočni dijelovi IC-a identični sa svojim detaljima funkcioniranja pinouta, prikazani raspored motora mogao bi se zamijeniti preko relevantnih pinouta kako bi se postiglo identično funkcioniranje kao što je gore objašnjeno, što znači da bi se na lijeva strana IC-a točno onako kako je izvedeno na desnoj strani IC-a na dijagramu.
Slično tome, dvosmjerni sustav mogao bi se ugraditi na desnu stranu pinout-a IC, točno onako kako je postignuto na lijevoj strani IC-a na gore prikazanom dijagramu.
Gornji primjer pokazuje kako se IC L293 može koristiti za pojedinačno upravljanje 4 motora ili 2 motora u dvosmjernom načinu, te kako se brzina također može kontrolirati pomoću PWM napajanja na odgovarajućim ulaznim pinoutima IC-a.
Korištenje L293 za upravljanje dvofaznim BLDC motorom

Na gornjoj slici možemo vidjeti kako se IC L293 može konfigurirati za upravljanje dvofaznim BLDC motorom pomoću naznačenih pinouta i kroz nekoliko upravljačkih ulaza prikazanih kao kontrola A i kontrola B.
Može se vidjeti jedan dvofazni motor povezan preko izlaza IC-a, dok su ulazi povezani nizom NE-ulaza koji postaju odgovorni za stvaranje potrebne antifazne ulazne logike za upravljanje motorom.
Točke upravljanja A i B mogu biti podvrgnute izmjeničnoj logici kako bi se omogućilo ispravno okretanje dvofaznog motora.
Polaritet izmjenične logike određuje smjer rotacije motora.
Za postizanje linearne regulacije broja okretaja na motoru, PWM oblik logike mogao bi se implementirati na ulaze upravljanja A i upravljanja B i njegov radni ciklus mogao bi se mijenjati za postizanje željene regulacije brzine na povezanom motoru.
Ako imate dodatnih dvojbi u vezi s tehničkim specifikacijama ili tablicom podataka ili detaljima pinouta IC-a, uvijek možete slobodno komentirati dolje za trenutne odgovore.
Prethodno: Bežični termometar koji koristi RF vezu od 433 MHz pomoću Arduina Dalje: Univerzalni ESC krug za BLDC i motore alternatora