Vrlo je zanimljiva stvar kojom se upravlja robotom tehnologija daljinskog upravljanja - koristi li se robot za zabavne igre orijentirane aplikacije ili za tehničke operacije kućna automatizacija i industrijske primjene (odabir i postavljanje robota, linija koja slijedi robota , detektor metala robotsko vozilo, IR kontrolirano robotsko vozilo, robotsko vozilo za gašenje požara , robotsko vozilo kojim upravlja mobitel, robot koji špijunira s ratnim poljem s bežičnom kamerom za noćni vid, robotsko vozilo s glasovnim upravljanjem) i tako dalje].
Koraci za izradu robotskog tijela i mehaničkog sustava daljinskog upravljanja vrlo su zanimljivi za hobiste električne i elektroničke industrije i studente. Ali, u ovom članku dajemo detaljan i lako razumljiv, detaljni opis izrade robota na daljinsko upravljanje. Općenito, tijelo robota dizajnirano je pomoću kotača, metalnih traka, metalne ili plastične ploče, Istosmjerni motori , diskretni dijelovi, spojne žice, matice i vijci.
Ovdje dani detaljni postupci pomoći će vam da sami napravite robota na daljinsko upravljanje na profesionalni način. Možete naučiti kako izraditi tijelo robota, kao i njegov mehanizam daljinskog upravljanja s danim infografika . Ovaj članak zasigurno pruža tehničke vještine potrebne za izradu robota na daljinsko upravljanje.
Napomena: Ovaj infografski robot s daljinskim upravljačem namijenjen je isključivo studentima inženjerima i elektroničkim hobistima, a nije namijenjen u komercijalne svrhe. (Primjenjuju se uvjeti i odredbe - Ne pokušavajte sami provesti korake dane u ovom članku ako ne znate kako se rukuje električnim i električnim napajanjem. elektronički sklopovi ).
8 koraka za dizajn robota na daljinsko upravljanje
Korak 1: Upoznajte aplikaciju robota i počnite analizirati tijelo robota
Prvenstveno morate znati aplikaciju za koju ćete dizajnirati robota na daljinsko upravljanje. Na temelju aplikacije trebate dizajnirati tijelo robota. Ovdje raspravljamo o tome kako napraviti IR daljinsko upravljano robotsko vozilo.
Korak 2: Prikupite hardverske komponente potrebne za izradu tijela robota
Nakon što odlučite o primjeni robota, okupite sve potrebne dijelove tijela robota, kao što su plastična ploča, kotači, metalne trake, istosmjerni motori i sve ostale komponente kako biste napravili tijelo robota.
Korak 3: Izgradite Robotovo tijelo
Popravite prikupljene komponente da tvore tijelo robota. Pričvrstite kotače pomoću metalnih traka, istosmjernih motora i pobrinite se da završite cijeli sklop robotskog tijela opremanjem, lemljenjem i lijepljenjem.
Korak 4: Odaberite tehnologiju daljinskog upravljanja
Nakon dizajniranja cijelog tijela robota, trebate kontrolirati robota pomoću tehnike daljinskog upravljanja. Odaberite odgovarajuću tehnologiju daljinskog upravljanja na temelju zahtjeva aplikacije. Za upravljanje robotom možete koristiti infracrveni daljinski upravljač za televizor ili tehnologiju IR daljinskog upravljanja.
Korak 5: Analizirajte i dizajnirajte krug daljinskog upravljača
Analizirajte komponente potrebne za dizajn sklopa daljinskog upravljanja za upravljanje robotom pomoću infracrvene tehnologije. Zatim projektirajte sklop i instalirajte komponente na PCB, a zatim na odgovarajući način lemite komponente kruga.
Korak 6: Procijenite komunikacijsku tehnologiju za daljinsko upravljanje
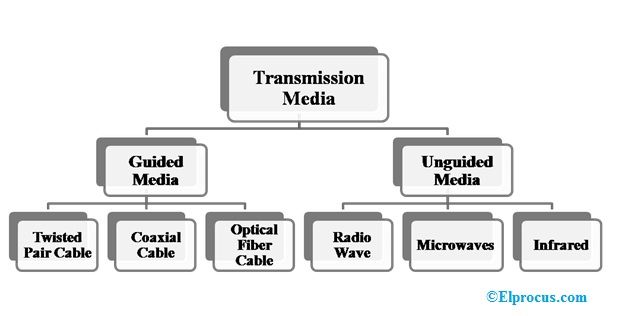
Za daljinsko upravljanje robotom potreban je komunikacijski sustav. Postoje različite vrste komunikacija za dizajn sustava daljinskog upravljanja. Na temelju zahtjeva poput dometa do kojeg je namijenjen daljinski upravljač, zahtjeva vidljivosti itd., Morate odabrati odgovarajuću daljinsku tehnologiju. Možete koristiti IR daljinsku tehnologiju koja se koristi.
Korak 7: Dizajnirajte IR daljinski upravljač
Infracrveni sustav daljinskog upravljanja sastoji se od kraja odašiljača i kraja prijemnika. Kraj odašiljača koristi kontroler, a kraj prijemnika povezan je s robotom.
Korak 8: Upravljanje robotom pomoću daljinskog upravljača
Robotom se može daljinski upravljati pomoću tipki IR odašiljača. Kada se pritisnu ove tipke, odgovarajuće naredbe šalju se primatelju robota za pomicanje robota u smjeru za naprijed, natrag, ulijevo ili udesno.

Ugradite ovu sliku na svoju stranicu (kopiraj kod u nastavku):