U modernom svijetu, robot će igrati važnu ulogu . Glavna svrha robota je smanjiti čovjekovu snagu. Roboti se koriste u elektronici u mnogim primjenama. U ovom smo članku razgovarali o tome kako izraditi robota s Arduino modulom i mikrokontrolerom 8051. Da bismo izradili robota s Arduinom, objašnjavamo mu rodu s izbjegavanjem prepreka. Potrebne komponente uključuju tijelo robota, istosmjerni motor, ultrazvučni senzor, Arduino modul, IC upravljački program motora i Arduino modul
Kako izraditi robota?
The potrebne komponente za izgradnju robota uključuje sljedeće
Tijelo robota
Osnovno tijelo robota robot za izbjegavanje prepreka prikazan je na sljedećoj slici. Tijelo robota je plastično tijelo i sadrži kotače s obje strane. Ispred tijela robota postavljen je ultrazvučni senzor. Korištenjem ultrazvučnog senzora prepreka može otkriti. Kada se robot kreće, ako ultrazvučni senzor otkrije bilo koju prepreku, robot će se pomaknuti u stranu i nastavit će se kretati.

Tijelo robota
Istosmjerni motor
The Istosmjerni motor je električni motor a radi na istosmjernoj struji. Rad bilo kojeg elektromotora temelji se na elektromagnetizmu. Magnetsko polje stvara provodnik struje kad se postavi u vanjsko magnetsko polje, iskusit će silu proporcionalnu struji u vodiču. Općenito znamo da su magneti suprotne privlačnosti polariteta od sjevera prema jugu i ako polariteti su isti poput sjevera prema sjeveru i juga prema jugu, tada će se magneti odbiti.

Istosmjerni motor
Unutarnja konfiguracija istosmjernog motora dizajnirana je za pričvršćivanje magnetske interakcije između vodiča za nošenje struje i vanjskog magnetskog polja radi stvaranja pokreta. U ovome koristimo dva istosmjerna motora, svaki motor sadrži 6v, a ukupno dva istosmjerna motora sadrže 12v. Dva istosmjerna motora smještena su u tijelo robota što možemo uočiti na sljedećoj slici. Tijelo robota pomiče se uz pomoć istosmjernih motora

Tijelo robota s istosmjernim motorom
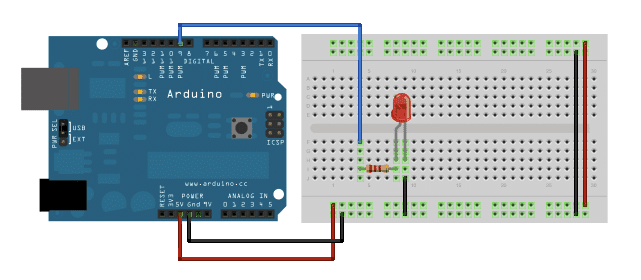
Arduino modul
Sljedeća slika prikazuje sliku arduino modula. The modul arduino igra važnu ulogu u dizajnu robota za izbjegavanje prepreka pomoću arduino kompleta. Pin prijemnika arduina spojen je na drugi pin ultrazvučnog senzora, a 1., 2. i 3. pin arduino modula povezani su s pokretačkim motorom istosmjerne struje. Kondenzator i dioda zajedničkih komponenata također su povezani s arduino modulom uz pomoć napajanja iz baterije.

Arduino modul
IC vozača motora
Za pokretanje istosmjernog motora IC vozača motora koristi. Igle 3,6 i 11,14 pogonskog sklopa motora spojene su na istosmjerni motor. Ulazni pin 1 i 2 povezani su s arduino modulom, a pin za omogućavanje povezan je s pinom odašiljača arduina. Igle 4, 5, 12, 13 vozača motora spojene su na masu.

IC vozača motora
Ultrazvučni senzor
U ovom konceptu ultrazvučni senzor koristi se za otkrivanje prepreke ispred i ona će poslati naredbu na ploču arduino. Ovisno o ulaznom signalu, mikrokontroler preusmjerava robota da se kreće u alternativnim smjerovima.

Ultrazvučni senzor
Primjene arduino robota za izbjegavanje prepreka
- Robot arduino može se kretati po bilo kojoj površini
- Može se kretati metalnom površinom poput tijela hladnjaka.
Sljedeća slika prikazuje robota arduino za izbjegavanje prepreka

Robot Arduino za izbjegavanje prepreka
Za izgradnju robota sa mikrokontroler 8051 objašnjavamo u vezi s vozilom robota detektor metala. Komponente potrebne za izgradnju robota s mikrokontrolerom 8051 su
- 8051 mikrokontroler
- Istosmjerni motori
- Vozači motora
- Detektor metala
- Dekoder
- Davač
- Tipke
- Kristal
- RF odašiljač i prijemnik
Detektor metala
The detektor metala je zavojnica koja ima jednu ili više metalnih zavojnica koje se koriste za otkrivanje metala na tlu. Detektor metala radi na principu elektromagnetske indukcije. Detektor metala povezan je s tijelom robota putem PCB-a što možemo uočiti na posljednjoj slici. Sljedeća slika prikazuje opći detektor metala koji se koristi u elektroničkim projektima.

Detektor metala
Tipke
Gumbi su gumbi koji se sastoje od tvrdih metala poput plastike i metala. Općenito se tipke koriste za resetiranje programa u mikrokontroleru. Sljedeća slika prikazuje sliku gumba.

Pritisnite tipku
8051 Mikrokontroler
The 8051 mikrokontroler sastoji se od 40 pinova . Četvrti i peti pin mikrokontrolera spojen je na kristalni oscilator. Vcc pin se daje na napajanje od 5V, a uzemljenje je spojeno na masu. Pribadače 15, 16, 18, 19 mikrokontrolera spojene su na IC kodera HT12E. Igle mikrokontrolera 2, 7, 8, 9 spojene su na tipke.
Sljedeća slika nakon spajanja svih komponenata poput otpornika, kondenzatora, kristalnog oscilatora, mikrokontrolera serije 8051, kodera i slično je uključena tiskana pločica .

PCB veze
Ispod je slika robota detektora metala s mikrokontrolerom serije 8051.

Robot za detektor metala s mikrokontrolerom serije 8051
U ovom smo članku razgovarali o Kako izraditi robota s arduinom i 8051 mikrokontrolerom . Nadam se da ste čitajući ovaj članak stekli neko osnovno znanje za izgradnju robota. Ako imate pitanja o ovom članku ili o elektronici i komunikacijski projekti , slobodno komentirajte u odjeljku ispod. Evo pitanja za vas, Što je mikrokontroler serije 8051?
.