Post objašnjava metodu koja se vjerojatno može koristiti za poboljšanje sposobnosti pasivnog infracrvenog senzora za otkrivanje čak i statične ili papirnate ljudske prisutnosti. Ova značajka obično nije moguća kod uobičajenih PIR senzora.
Kako PIR otkriva ljudsku prisutnost
Već sam raspravljao o mnogim aplikacijama detektora pokreta temeljenim na PIR-u na ovom web mjestu, međutim za sve te aplikacije potrebna je neprekidna ljudska prisutnost kako bi PIR detektirao njihovu prisutnost, čini se da je to veliki nedostatak koji sprječava ove jedinice da osjete stalna ili stacionarna ljudska zauzetost.
Međutim, gore objašnjeni nedostatak iza sebe ima razlog. Konvencionalni PIR senzori djeluju osjetljivanjem IR signala iz ljudskog tijela kroz nekoliko paralelnih utora na njihovoj prednjoj leći, a njegov se unutarnji sklop aktivira samo kad se IC signali ukrste između tih osjetnih utora ('vizije').
Ukrštanje IR signala preko osjetljivih utora omogućuje PIR krugu da prevede informacije u dva odgovarajuća izmjenična impulsa, koji se zauzvrat ispravi kako bi se generirao okidački napon na izlaznom pinu PIR-a.
PIR ne može otkriti cilj pribora
To podrazumijeva da ako je IR izvor nepomičan, on neće tražiti od PIR modula da proizvodi bilo koji okidač preko svog izlaznog pina. To također podrazumijeva da bi IR signal s izvora trebao nekako nastaviti prelaziti dane PIR utora za detekciju kako bi mogao osjetiti određeno ljudsko biće unutar zone.
Čini se da za to nema izravnog ili jednostavnog lijeka, jer se PIR moduli ne mogu interno modificirati za to, što osakaćuje jedinicu da detektira stacionarnu ljudsku prisutnost.
Međutim, logična primjedba govori nam da ako je njegov različiti IR izvor koji će možda biti potreban da bi PIR modul bio aktiviran, zašto onda ne prisiliti sam PIR da bude u stalnom pokretu umjesto subjekta.
Koncept se može vizualizirati iz sljedeće GIF simulacije, koja prikazuje oscilirajući PIR modul i statično ljudsko biće u zoni otkrivanja.

Ovdje možemo vidjeti kako se oscilirajući PIR prilagođava problemu i transformira, omogućujući otkrivanje čak i statičnih IR subjekata.
To postaje moguće jer svojim pomicanjem PIR modul pretvara stacionarni IR izvor u IC koji se neprestano mijenja kroz svoja dva prihvatna utora.
Iako ideja izgleda složeno, ona se zapravo može jednostavno riješiti pomoću polako oscilirajućeg PwM upravljanog kruga motora.
Cjelokupni mehanizam i pojedinosti o krugu naučit ćemo u sljedećim odjeljcima.
Kao što smo već razgovarali, konvencionalni PIR moduli mogu otkriti samo pokretne žive objekte i ne mogu identificirati nepokretni cilj zbog čega je njegova primjena ograničena samo kao ljudski detektor pokreta.
Za aplikacije u kojima je otkrivanje nepomičnih osoba zauzeće ljudi neophodno u takvim scenarijima, konvencionalni PIR može postati beskoristan i možda će trebati neki vanjski aranžman za samu nadogradnju.
Dizajniranje PIR-a za otkrivanje nepomičnih ciljeva
U gornjem odjeljku saznali smo da se PIR modul, umjesto potrebe da se meta kreće, može sam pomicati preko određenog radijusa radi provođenja željenog statičkog otkrivanja cilja.
U sljedećim odjeljcima saznajemo o jednostavnom krugovnom mehanizmu koji se može koristiti s PIR-om montiranim na mali istosmjerni motor za predložene oscilacije.
Vozač motora kojim upravlja PWM / flip Flop
Sustav u osnovi zahtijeva određivanje brzine kontrolirane PWM-om i prebacivanje japanke za motor. Sljedeći dijagram pokazuje kako se ove značajke mogu pripisati PIR motoru uz pomoć jednostavnog sklopa:

Prikazani krug koristi jedan IC HEF40106 šesterokutni invertirajući Schmitt IC koji uključuje 6 INverterskih ulaza.
Vrata N1 i N2 su konfigurirana da proizvode podesivi PWM izlaz koji se dovodi na vrata N4, N5, N6 koji čine odbojnike.
Uobičajeni izlaz iz ovih međuspremnika završava se na vratima MOSFET-a vozača motora.
Sadržaj PWM-a postavlja se uz pomoć P1, koji se napokon primjenjuje na priključeni motor putem skupa DPDT relejnih kontakata.
Ti kontakti releja određuju smjer kretanja motora (u smjeru kazaljke na satu ili u smjeru suprotnom od kazaljke na satu).
Ovim kontaktima releja flip flopa DPDT-a upravlja nestabilni tajmer konfiguriran oko vrata N3, pri čemu kondenzator C3 / R3 određuje kojom brzinom relej treba prebaciti kako bi omogućio motoru da dosljedno mijenja svoj smjer vrtnje.
Gornji dizajn omogućuje motoru da izvodi traženo polagano oscilirajuće kretanje kroz zadanu radijalnu zonu.
Može se odabrati C3 za pokretanje promjene nakon svakih 5 do 6 sekundi, a PWm se može prilagoditi kako bi se omogućilo izuzetno usporeno kretanje motora, jer samo treba osigurati da prorezi PIR-a prelaze preko IR signala cilja u pravodobno.
Međutim, budući da je rad motora spor, izlaz iz PIR-a morat će se održavati kroz tajmer odgađanja (OFF), tako da se priključeno opterećenje ne isključuje i ne uključuje dok se kretanje motora naizmjence presijeca kroz IR linije od ljudske zauzetosti.
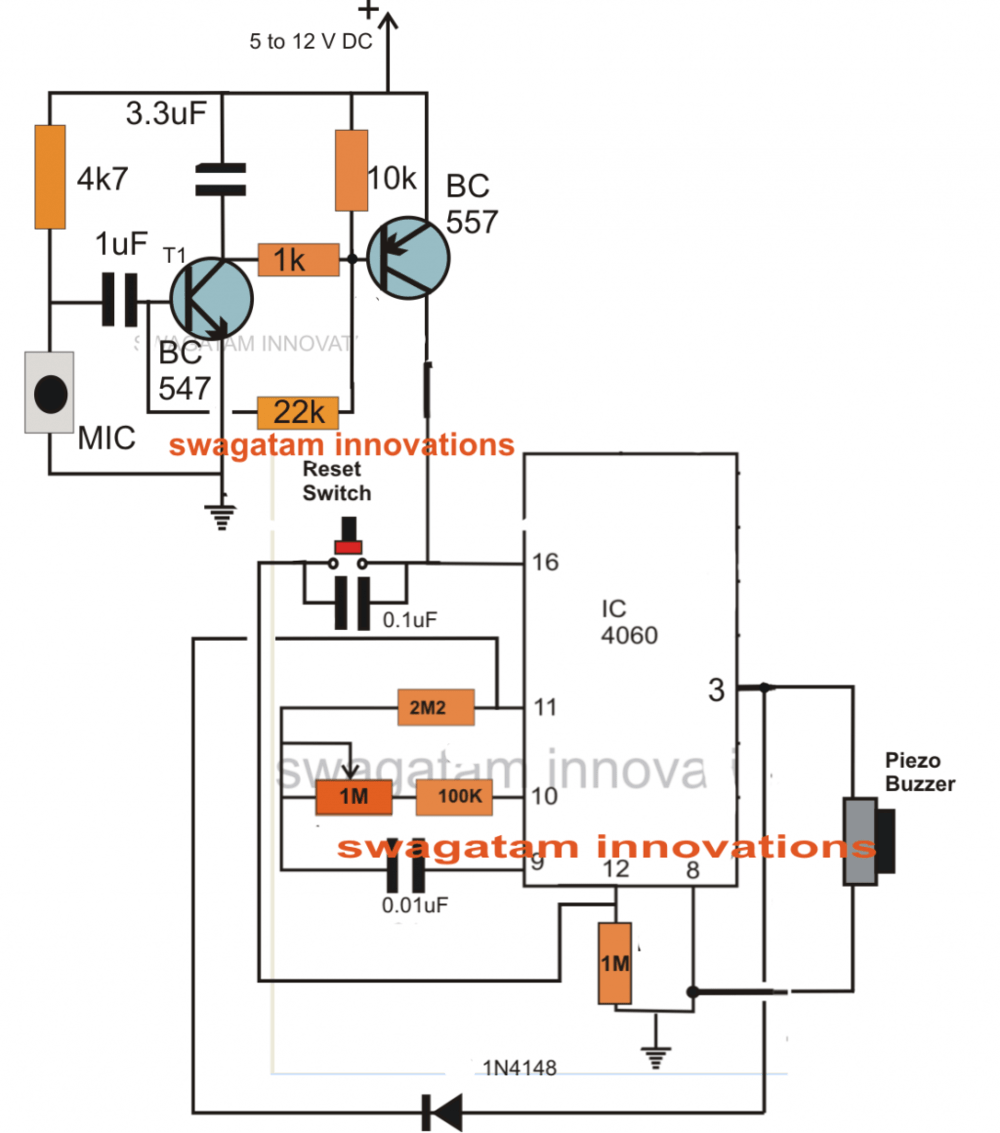
Odgoda vremena
Sljedeće stupanj kruga timera odgode može se koristiti što osigurava da svaki put kad PIR izlaz proizvede osjetljivi impuls, kašnjenje od tajmera se produži za 5 do 10 sekundi i povezano opterećenje se nikada ne prekida tijekom postupka.

U gornjoj postavci možemo vidjeti motor koji napaja svoj električni pogon iz faze PWM / japanke kao što je raspravljano u prethodnom odlomku.
Vreteno motora može se vidjeti u sprezi s vodoravnom osovinom preko koje je PIR stegnut, tako da kada se motor pomiče, PIR prolazi kroz odgovarajuće promjenjivo radijalno gibanje.
Dok se inducira gore navedeno PIR kretanje, IR signali s nepokretnog cilja u zoni detektiraju se u obliku kratkih izmjeničnih impulsa koji se generiraju na izlaznom pinu PIR-a označenom plavom žicom.
Ti se impulsi primjenjuju na kondenzatoru od 1000 uF koji se puni sa svakim impulsom i osigurava da BC547 ostane u provodnom načinu bez prekida tijekom postupka.
Pogonski relej koji se sastoji od stupnja BC557 reagira na gornji stabilni signal sa BC547 kolektora i zauzvrat drži relej UKLJUČEN, sve dok PIR neprestano detektira ljudsku prisutnost.
Relejno opterećenje tako ostaje kontinuirano aktivirano zbog prisutnosti nepokretnog ljudskog bića u tom području.
Međutim, u slučaju da se ukloni ljudsko stanište ili kad se cilj odmakne od zone, stupanj odgodnika zadržava relej i teret aktiviran predviđenih 5 do 10 sekundi nakon čega se trajno isključuje, sve dok zona ponovno ne bude zarobljena potencijalnim izvorom IR zračenja.
Popis dijelova
- R1, R4 = 10K
- R2 = 47 OHMS
- P1 = 100K LONAC
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0,1uF / 100V
- Z1 = 15V, 1/2 WATT
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = DPST PREKIDAČ ILI DPDT RELEJ
- R3, C3 koji će se odrediti nekim pokušajima i pogreškama
AŽURIRAJ:
Gore objašnjeni PIR krug za otkrivanje statičke ljudske prisutnosti može se znatno pojednostaviti korištenjem kruga signalnog sjeckalica kako je prikazano u sljedećoj GIF simulaciji:
Pažljiv pregled pokazuje da zapravo oscilatorno kretanje jednostavno nije potrebno, motoru i nožu sjeckalice može se omogućiti slobodno okretanje držeći brzina motora na nižoj razini .
Ovo bi također učinkovito ostvarilo namjeravanu statičku operaciju PIR osjetljivosti.

Video demonstracija koja dokazuje statično otkrivanje PIR-a kod ljudi
Prethodno: Objašnjena 3 zvučno aktivirana sklopka Dalje: 4 jednostavna kruga sirene koje možete izgraditi kod kuće