
CAN ili Controller Area Network je dvožična poludupleksna brza serijska mrežna tehnologija. U osnovi se koristi u komunikaciji između različitih uređaja u regiji niskog radijusa, kao što je automobil. CAN protokol je CSMA-CD / ASM protokol ili arbitraža otkrivanja sudara s višestrukim pristupom u smislu protokola prioriteta poruke. CSMA osigurava da svaki čvor mora pričekati određeno razdoblje prije slanja bilo kakve poruke. Otkrivanje sudara osigurava izbjegavanje sudara odabirom poruka na temelju njihovog propisanog prioriteta.
Omogućuje brzinu signalizacije od 125 kbps do 1 Mbps. Pruža 2048 različitih identifikatora poruka.
Standard je ISO-11898 i koristi 7-slojni model interkonekcije otvorenih sustava.
Povijest:
Razvio ga je Robert Bosch 1982. godine, a službeno ga je objavilo Detroitovo društvo automobilskih inženjera 1986. Prvi automobil koji integrira CAN sabirnicu proizveo je Mercedes Benz 1992. godine.
Arhitektura ISO 11898:

Izvor slike - theremino
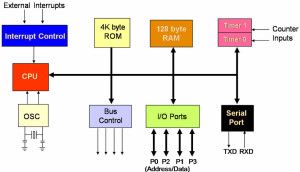
Slojevita arhitektura sastoji se od tri sloja
- Sloj aplikacije : Interakcija je s operativnim sustavom ili aplikacijom CAN uređaja.
- Sloj podatkovne veze : Povezuje stvarne podatke s protokolom u smislu slanja, primanja i provjere valjanosti podataka.
- Fizički sloj : Predstavlja stvarni hardver.
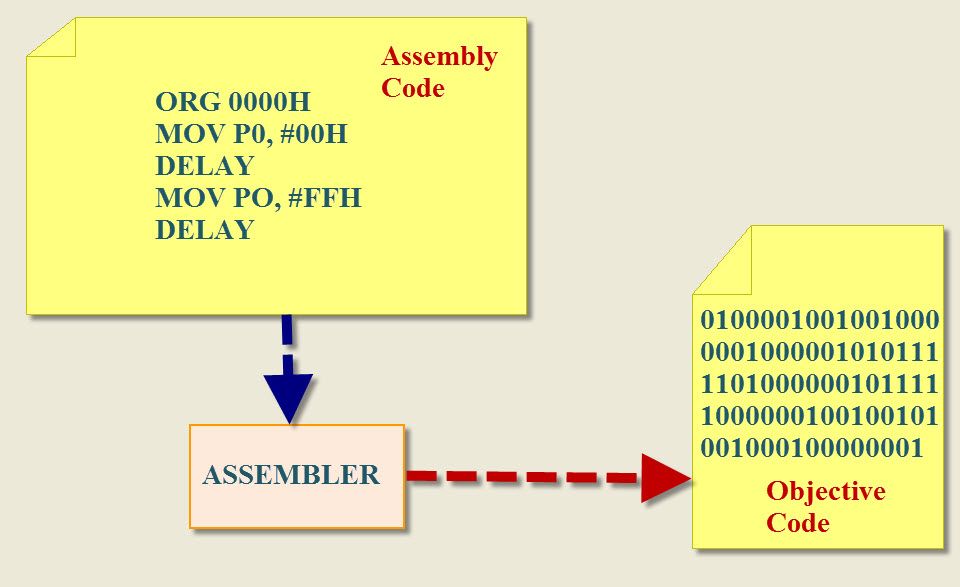
Standardni okvir CAN sastoji se od sljedećih bitova:
 Standardni okvir CAN sastoji se od sljedećih bitova:
Standardni okvir CAN sastoji se od sljedećih bitova:
- SOF- Početak fra ame. Poruka započinje od ove točke.
- Identificirati : Odlučuje o prioritetu poruke. Niža binarna vrijednost, veći je prioritet. To je 11 bit.
- RTR - Zahtjev za daljinski prijenos. Dominantno je kad se traže informacije s drugog čvora. Svaki čvor prima zahtjev, ali samo onaj čvor čiji se identifikator podudara s onim u poruci je potreban čvor. Svaki čvor također prima odgovor.z
- OVDJE - Jedno identifikacijsko proširenje. Ako je dominantan, znači da se prenosi standardni CAN identifikator bez produžetka.
- R0 - rezervirani bit.
- DLC - Kôd duljine podataka. Definira duljinu podataka koji se šalju. To je 4 bit
- Podaci - Može se prenijeti do 64 bitnih podataka.
- CRC - Provjera cikličkog viška. Sadrži kontrolnu sumu (broj prenesenih bitova) prethodnih podataka aplikacije za otkrivanje pogrešaka.
- ALAS - Priznajte. To je za 2 bita. Dominantno je ako se primi točna poruka.
- EOF - kraj kadra. Označava kraj okvira limenke i onemogućava punjenje bitova.
- IFS - Inter Frame prostor. Sadrži vrijeme potrebno kontroloru za premještanje ispravno primljenog okvira u njegov pravilan položaj.
5 Različite vrste poruka su:
- Okvir podataka : Sastoji se od proizvoljnog polja, polja podataka, CRC polja i polja za potvrdu.
- Udaljeni okvir : Zahtijeva za prijenos podataka s drugog čvora. Ovdje je RTR bit recesivan.
- Okvir pogreške : Prenosi se kad se otkrije pogreška.
- Okvir za preopterećenje : Koristi se za kašnjenje između poruka. Prenosi se kad čvorovi postanu prezauzeti.
- Važeći okvir : Poruka je valjana ako je EOF polje recesivno. Inače se poruka ponovno prenosi.
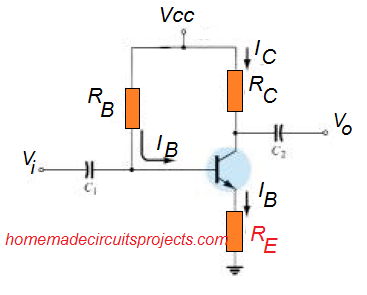
MOŽE fizički sloj:
MOŽE autobus

Izvor slike - digitalni.ni
Sastoji se od dvožične serijske veze CAN_H i CAN_L, a njihove međusobne razine napona određuju da li se prenosi 1 ili 0. Ovo je diferencijalna signalizacija. Struja koja teče u svakoj signalnoj liniji jednaka je, ali suprotna u smjeru, što rezultira efektom poništavanja polja koji je ključ za male emisije buke. To osigurava uravnoteženu diferencijalnu signalizaciju koja smanjuje sprezanje šuma i omogućuje visoku brzinu prijenosa preko žica. Obično su to žice upletenih parnih kabela duljine sabirnice od 40 m i najviše 30 čvorova. To je oklopljeni ili neoklopljeni kabel s karakterističnom impedancijom od 120 Ohma.
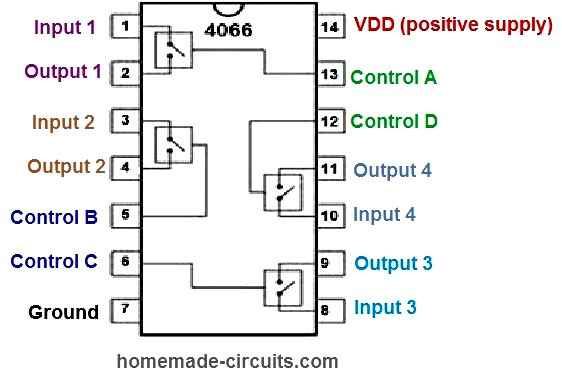
MOŽE PRIJEMNIK:

MOŽE za vozila Hugo Provencher. Dvije žice CANH i CANL normalno su na 2.5V koje određuju dva tranzistora i izvor napona 2.5V. U osnovi, razlika između dviju žica uvijek bi trebala biti 0. Upravljačka jedinica upravljačkog pogona određuje napon primijenjen na žice CANH i CANL. Kada su oba tranzistora provodljiva, pad napona na 1svtranzistor i dioda je 1,5V, što dovodi do povlačenja žice CANH do 3,5V. Pad napona na 2ndtranzistor i dioda je 1V, zbog čega se žica CANL spušta na 1,5V. Diode se koriste za zaštitu od visokog napona. Prijemnik je sklop za diskriminaciju koji daje izlaz 1 kada su dva ulaza CANH i CANL jednaki i izlaz 0 ako su dva ulaza različita. TXD dominantan blok koristi se za zaštitu od zemljospoja, a termički blok za isključivanje onemogućava upravljački program ako se diode i tranzistori pregriju.
Prednosti CAN-a:
- Smanjuje ožičenje jer je to distribuirana kontrola, a to osigurava poboljšanje performansi sustava.
- Mnogi proizvođači CAN čipova pod uvjetom da su sloj podatkovne veze i fizički sloj povezani s čipom, a sve što programer treba učiniti jest razviti kodiranje aplikacije.
- Pruža mogućnost rada u različitim električnim okruženjima i osigurava prijenos bez buke.
- Zagušenost prometa uklanja se jer se poruke prenose na temelju njihovog prioriteta i omogućuje cijeloj mreži da ispuni vremenska ograničenja.
- Omogućuje prijenos bez pogrešaka jer svaki čvor može provjeriti greške tijekom prijenosa poruke i poslati okvir pogreške.
CAN radni primjer:
Područna mreža kontrolera ima široku primjenu u industriji, kao i u vozilima. Jedna od glavnih aplikacija uključena je u komunikaciju između različitih uređaja u vozilu. Drugi može biti među različitim mikrokontrolerima, pretpostavimo za otkrivanje lozinke, koji se koristi za ispunjavanje bilo kakvih zahtjeva poput otvaranja zaključanih vrata pomoću lozinke ili uključivanja žarulje itd.

Krug mrežne mreže kontrolera
Osnovna aplikacija sastoji se od 3 mikrokontrolera koji međusobno komuniciraju pomoću dvije žice kao u CAN mreži. 1svmikrokontroler povezan je s tipkovnicom, 2ndLCD-om, a treći zujalicom i relejem koji upravlja lampom. Kada se na tipkovnici unese lozinka, 2ndmikrokontroler djeluje kao prijamnik i prima prenesenu poruku bit po bit s 1svodašiljač i prikazuje poruku na LCD-u. Kad se cijela poruka prenese, 2ndmikrokontroler vrši provjeru i ako je lozinka pogrešna, šalje signal na 3rdmikrokontroler koji zauzvrat šalje zujalo uključen je s ovim signalom. Kada je lozinka ispravna, 3rdmikrokontroler uključuje relej koji zauzvrat uključuje lampu.








{kind=link}
{kind=link}